combines and provides basic functionalities of QPModelDataObject and UQPModelBlockObject, but is still abstract More...
#include <UQPModelBlock.hxx>
Public Member Functions | |
| void | clear () |
| reset to "empty/no" model information | |
| UQPModelBlock (CBout *cb=0, int cbinc=-1) | |
| default constructor | |
| virtual | ~UQPModelBlock () |
| vritual destructor | |
| virtual const MinorantPointer & | get_constant_minorant () const |
| gives reading access to a constant offset minorant | |
| virtual const MinorantBundle & | get_bundle () const |
| gives reading access to the bundle minorants of the cutting model | |
| virtual MinorantPointer & | get_constant_minorant () |
| gives access to a constant offset minorant | |
| virtual MinorantBundle & | get_bundle () |
| gives access to the bundle minorants of the cutting model | |
| virtual int | push_aft (const AffineFunctionTransformation *inaft, const CH_Matrix_Classes::Indexmatrix *global_indices, const CH_Matrix_Classes::Indexmatrix *local_indices, std::map< MinorantPointer, MinorantPointer > *precomputed=0) |
| applies the AffineFunctionTransformation to constant_minorant and bundle, where (if given) only the global_indices of the transformed subgradients are required which need the local_indices only. If precomputed is given, it may contain some or contains afterwards a map from original minorant to transformed minorant; retunrs 0 on success | |
| virtual int | pop_aft () |
| undo the last push_aft | |
 Public Member Functions inherited from ConicBundle::QPModelDataObject Public Member Functions inherited from ConicBundle::QPModelDataObject | |
| QPModelDataObject (CBout *cb=0, int cbinc=-1) | |
| default constructor | |
| virtual | ~QPModelDataObject () |
| virtual destructor | |
| virtual int | add_modelx_aggregate (CH_Matrix_Classes::Real &offset, CH_Matrix_Classes::Matrix &gradient)=0 |
| this routine is added here mainly to allow for comperative testing; for the current value of x it adds the aggregate minorant (offset and gradient) to the arguments. Caution: the bundle used might have been modified by AffineFuncitonTransformations and need not be the same as initialized with. | |
| Public Member Functions inherited from ConicBundle::CBout | |
| virtual void | set_out (std::ostream *out=0, int print_level=1) |
| Specifies the output level (out==NULL: no output at all, out!=NULL and level=0: errors and warnings, level>0 increasingly detailed information) More... | |
| virtual void | set_cbout (const CBout *cb, int incr=-1) |
| Specifies the output level relative to the given CBout class. More... | |
| void | clear_cbout () |
| reset to default settings (out=0,print_level=1) | |
| CBout (const CBout *cb=0, int incr=-1) | |
| calls set_cbout | |
| CBout (std::ostream *outp, int pl=1) | |
| initialize correspondingly | |
| CBout (const CBout &cb, int incr=0) | |
| copy constructor | |
| virtual bool | cb_out (int pl=-1) const |
| Returns true if out!=0 and (pl<print_level), pl<0 should be used for WARNINGS and ERRORS only, pl==0 for usual output. | |
| std::ostream & | get_out () const |
| If cb_out() returned true, this returns the output stream, but it will abort if called with out==0. | |
| std::ostream * | get_out_ptr () const |
| returns the pointer to the output stream | |
| int | get_print_level () const |
| returns the print_level | |
| virtual int | mfile_data (std::ostream &out) const |
| writes problem data to the given outstream | |
| Public Member Functions inherited from ConicBundle::UQPModelBlockObject | |
| virtual | ~UQPModelBlockObject () |
| virtual destructor | |
| virtual CH_Matrix_Classes::Integer | xdim () const =0 |
| dimension of externally visible primal variables | |
| virtual CH_Matrix_Classes::Integer | ydim () const =0 |
| dimension of externally visible dual variables | |
| virtual int | set_qp_xstart (CH_Matrix_Classes::Integer x_start_index)=0 |
| the indices of the local variables correspond to the indices of the qp variables x and z starting with this index; returns 0 on success, 1 on failure | |
| virtual int | set_qp_ystart (CH_Matrix_Classes::Integer y_start_index)=0 |
| the indices of the local variables correspond to the indices of the qp variables y starting with this index; returns 0 on success, 1 on failure | |
| virtual int | starting_x (CH_Matrix_Classes::Matrix &qp_x)=0 |
| generate a strictly feasible primal starting point, store it in the qpx_range of x; returns 0 on success, 1 on failure | |
| virtual int | starting_y (CH_Matrix_Classes::Matrix &qp_y, const CH_Matrix_Classes::Matrix &qp_Qx, const CH_Matrix_Classes::Matrix &qp_c)=0 |
| generate a strictly feasible dual starting point, store it in the qpy_range of y, x is fixed already by a previous call to starting_x and Qx=Q*x; returns 0 on success, 1 on failure | |
| virtual CH_Matrix_Classes::Real | get_local_primalcost () const =0 |
| returns the current local primal cost contribution <d,s> | |
| virtual CH_Matrix_Classes::Real | get_local_dualcost () const =0 |
| returns the current local dual cost contribution | |
| virtual int | get_Ab (CH_Matrix_Classes::Matrix &qp_A, CH_Matrix_Classes::Matrix &qp_b) const =0 |
| store the local coefficients of matrices A and b in the positions corresponding to qpy_range (rows) and qpx_range (columns); returns 0 on success, 1 on failure | |
| virtual int | restart_x (CH_Matrix_Classes::Matrix &qp_x, const CH_Matrix_Classes::Matrix &qp_c, const CH_Matrix_Classes::Matrix &qp_dc)=0 |
| it is assumed that the problem was solved already once and is now resolved for a new linear cost term qp_c that resulted from the old one by adding qp_dc. More... | |
| virtual int | restart_y (CH_Matrix_Classes::Matrix &qp_y, const CH_Matrix_Classes::Matrix &qp_Qx, const CH_Matrix_Classes::Matrix &qp_c, const CH_Matrix_Classes::Matrix &qp_dc)=0 |
| this is called after restart_x (see there) More... | |
| virtual int | add_xinv_kron_z (CH_Matrix_Classes::Symmatrix &barQ)=0 |
| add the system term corresponding to (xinv kron z) (that arises from solving the linearized perturbed complementarity system x*z =0 or =mu*I for dx in the preferred search direction) to the diagonal block corresponding to qpx_range x qpx_range | |
| virtual int | add_local_sys (CH_Matrix_Classes::Symmatrix &sysdy, CH_Matrix_Classes::Matrix &rhs)=0 |
| add the local system informatoin More... | |
| virtual int | suggest_mu (CH_Matrix_Classes::Real &ip_xz, CH_Matrix_Classes::Integer &mu_dim, CH_Matrix_Classes::Real &sigma, const CH_Matrix_Classes::Matrix &qp_dx, const CH_Matrix_Classes::Matrix &qp_dy, const CH_Matrix_Classes::Matrix &rhs_residual)=0 |
| supply the information for the choice of the next barrier parameter value More... | |
| virtual int | get_corr (CH_Matrix_Classes::Matrix &xcorr, CH_Matrix_Classes::Matrix &rhs, CH_Matrix_Classes::Real mu)=0 |
| supply the information for the corrector More... | |
| virtual int | line_search (CH_Matrix_Classes::Real &alpha, const CH_Matrix_Classes::Matrix &qp_dx, const CH_Matrix_Classes::Matrix &qp_dy, const CH_Matrix_Classes::Matrix &rhs_residual)=0 |
| perform a line search for the block variables More... | |
| virtual int | set_point (const CH_Matrix_Classes::Matrix &qp_x, const CH_Matrix_Classes::Matrix &qp_y, CH_Matrix_Classes::Real alpha)=0 |
| x,y,z is the new point and has to be stored, alpha is the step size used in the step, it is passed so thatthe block can take the same step for internal variables if needed. | |
| virtual CH_Matrix_Classes::Matrix & | add_Bs (CH_Matrix_Classes::Matrix &qp_vec) const =0 |
| add the local product of matrices B and s in the positions corresponding to qpy_range (rows) and return qp_vec; returns 0 on success, 1 on failure | |
| virtual CH_Matrix_Classes::Matrix & | subtract_z (CH_Matrix_Classes::Matrix &dual_residual, bool with_step=false) const =0 |
| add the contributions of the dual slacks and return dual_residual returns 0 on success, 1 on failure | |
Protected Attributes | |
| std::vector< MinorantPointer > | constant_minorant |
| constant offset minorant (fixed affine function to be added to the model) | |
| std::vector< MinorantBundle > | bundle |
| the minorants forming the cutting model; how to combine them is described in derived classes | |
Detailed Description
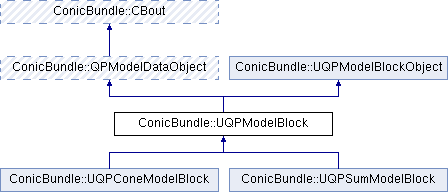
combines and provides basic functionalities of QPModelDataObject and UQPModelBlockObject, but is still abstract
This class serves as a base class for actual implementations of the models and provides some basic variables and functionalities required for uniform use by BundleModel and QPSolver.
In particular it provides storage for and access to the bundle (and possibly an additional constant minorant) of the underlying cutting model(s). It also ensures consistent handling of each AffineFunctionTransformation of this data. It might be worth to consider to collect the transformations and not to execute them at once, but direct execution of these transformations is the current approach.
Actual implementations are UQPSumModelBlock (for managing the sum of several model blocks) and UQPConeModelBlock.
The documentation for this class was generated from the following file:
