Ein professioneller Kraftsensor kostet richtig viel Geld. Kann man auch maßgeschneidert selbst bauen. Allerdings kosten auch die Dehnmessstreifen (DMS) Geld, ca. 10 € pro Stück. Hier lagen 16 Stück aus DDR-Zeiten herum, die noch verbaut werden sollten. Ausreichend für 4 Sensoren in Vollbrücke.
Zur Erinnerung die graue Theorie: Eine Kraft wird über einen elastischen Verformkörper mit der Federkonstante kx in einen Weg umgewandelt. Der Weg wird gemessen, indem dieser eine Widerstandsänderung hervorruft, damit eine elektrische Größe. (Es gibt auch andere Verfahren der elektrischen Wegmessung.) Um nicht Wegänderungen durch Temperaturunterschiede zu „messen“, werden mehrere DMS so verteilt, dass sich Temperatureinflüsse kompensieren, aber Wegänderungen (möglichst) addieren.
Häufige Verformkörper-Bauformen sind:
Man kann auch aus manchen Küchen- oder Personenwaagen fertige Verformkörper mit bereits aufgeklebten Dehnmessstreifen entnehmen. Dann ist allerdings deren Maximalbelastung festgelegt und entspricht der maximalen Gewichtskraft auf die Küchenwaage.
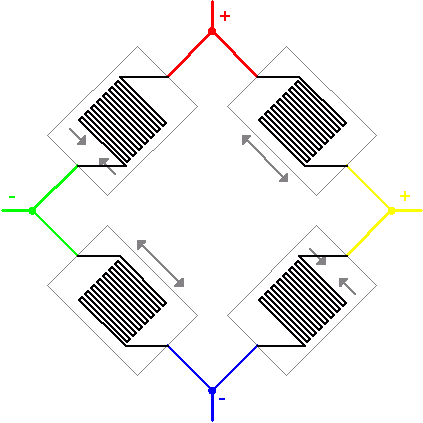
Eine simple Brückenschaltung.
Man muss nur aufpassen, die Wirkrichtungen der Dehnmessstreifen-Expansion
und -Kontraktion richtig zu verteilen:
Immer über Kreuz.
Die Speisung erfolgt an rot und blau, die Abnahme der Brückendiagonalspannung an gelb und grün. Es ginge auch andersherum.
Die angegebenen Vorzeichen beziehen sich auf die Expansion bzw. Kontraktion in Pfeilrichtung. Da der vorgesehene Verformkörper nur für Druckkräfte ausgelegt ist (also keine Zugkräfte), wurden die Vorzeichen gleich so festgelegt, dass die Diagonalspannung unter Belastung positiv wird.
In den Verformkörper mündet ein Kabel mitsamt Zugentlastung.
Mit der farblichen Darstellung im folgenden Bild
lässt sich die Verdrahtung nachvollziehen.
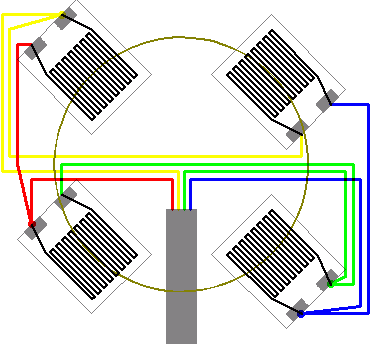
Der obige Schaltplan wurde um 90° nach links gedreht angewendet.
Eine Brücke ist nach dem Aufbau nie ganz abgeglichen. Ursache sind unvermeidbare Toleranzen bei der DMS-Fertigung. Da anzuschließende Messverstärker eine halbwegs abgeglichene Brücke erwarten, wird ein Kompensationswiderstand hinzugefügt, zweckmäßigerweise in Parallelschaltung und zweckmäßigerweise im Stecker. Zu seiner Bestimmung wird die Brücke an einer Gleichspannungsquelle (Labornetzteil) mit etwa 5 V angeschlossen und die Diagonalspannung gemessen. Diese sollte weniger als ±20 mV betragen und stabil sein.
| Rx = | R ∙ Us |
| 4 ∙ Ud |
Ist die Diagonalspannung negativ, dann zwischen blau und grün, sonst zwischen blau und gelb. Der genaue Widerstandswert ist wenig von Belang, ein gewöhnlicher 10-%-Typ aus der E12-Reihe genügt vollkommen.
Nach der Applikation des Widerstandes sollte die Diagonalspannung kleiner als ±1 mV betragen. Damit ist der Sensor – als solcher – fertig.
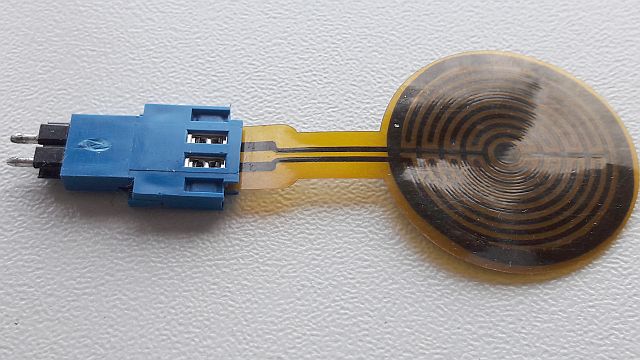
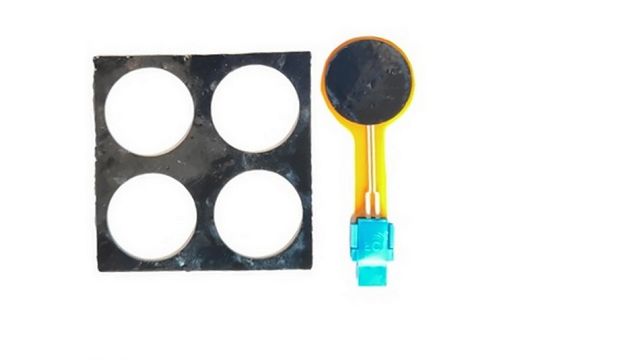
Unbekannter Sensor, sollte ich mal evaluieren.
Damit soll der Öldruck bei der Überfahrt des (Gleit?-)Schlittens
auf einer Linearführung gemessen werden, wenn ich's richtig verstanden habe.
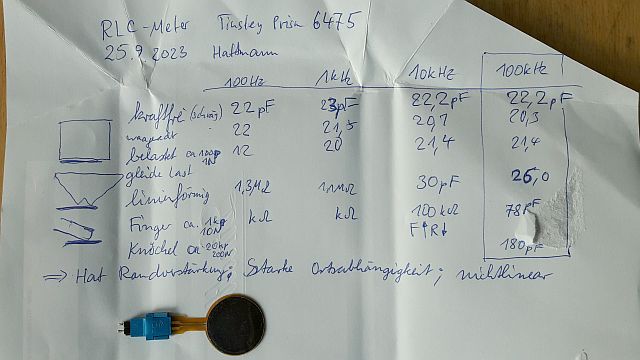
Im unbelasteten Zustand sind 22 pF messbar,
bei Belastung mit dem Finger (1 kp, 10 N) schon 78 pF,
bei Belastung mit dem Knöchel im Liegestütz (20 kp, 200 N) eher 180 pF.
Also ziemlich empfindlich und dabei nichtlinear.
Überarbeitet wurde dazu die Windows-Software für den (seriell angeschlossenen) Netzwerk-Analysator. Dieser brachte keine Erkenntnisse über irgendwelche Resonanzen, daher wurde zur Kapazitätsmessung übergegangen.
Ich ahne mal, dass der Anwender etwas fertiges mit Arduino erwartet.
Das ist jedoch nicht umsonst (= ohne extra Hardware) zu haben,
damit ist ein Arduino Nonsense.
Naheliegend erscheint mir die Einbettung des Sensors als Kapazität
in einen L-C-Oszillator und dessen Frequenzmessung.
Ein Fall für ein 74LVC2G04 und irgendetwas zum Messen der Frequenz.
Nun wären die gewünschten Abtastraten von Interesse …
Außerdem, wieviele solcher Sensoren verbaut werden sollen,
mit welchen Leitungslängen zu rechnen ist
(Streukapazität: Anordnung der Auswerteelektronik und deren Befestigung klären)
und wie eine evtl. Kalibrierung erfolgen soll.
Ich habe nach Mikrocontrollern recherchiert, die zur mehrkanaligen Frequenzmessung im MHz-Bereich geeignet sind. Da wurde ich erst bei STM32F4xx fündig, mit 4 Kanälen.
Gesprächsnotiz 231010: Maximalkraft (plan, flächig) 400 N. Kapazität sinkt (lt. Sensorentwickler) für F > 0 ab 50 kHz, daher Oszillatorfrequenz eher darunter. (Das denke ich nicht und glaube an einen Interpretationsfehler ihres verwendeten RLC-Meters.) Der eigentliche Sensor ist die Kunststoffscheibe auf der Leiterstruktur und benötigt dazu Minimalkontakt mit der Leiterstruktur. Die Flexplatine ist in einem nicht-lösbaren Stecker montiert, der zu öffnen geht; ich bräuchte davon eher eine SMD-Version oder den passenden Wannenstecker dazu. Die angegebene Ersatzschaltung besteht aus einem variablen Kondensator, einem variablen Parallelwiderstand von 1 MΩ bis 1 kΩ, sowie einem kleinen Serienwiderstand.
Im Einsatz schweben Amoog 5 Sensoren pro Gleitschiene vor. Also insgesamt 10 Sensoren für die beiden Gleitschienen.
Wie's scheint bezieht Amoog sich auf diese Veröffentlichung, Abschnitt 5.1.
Wie sich damit herausstellt besteht sowohl die Möglichkeit, die Kapazität als auch den Widerstand auszuwerten. Während die Kapazitätsmessung auf eine Kapazitäts-Frequenz-Umsetzung und Frequenzmessung hinausläuft, also die Einbettung in einen R-C- oder L-C-Oszillator, kann der Widerstand auch mehr oder weniger direkt mit einem A/D-Wandler eines Mikrocontrollers gemessen werden. Es wird erwartet, beide Methoden gegenüberzustellen. Zudem wurde erwartet, dass sich der Sensor direkt mit HBM QuantumX auszuwerten, aber — klarer Fall — das geht nicht.
Es ist klar, dass der Oszillator bei derart kleiner Kapazität
am besten in Sensornähe aufgehoben ist.
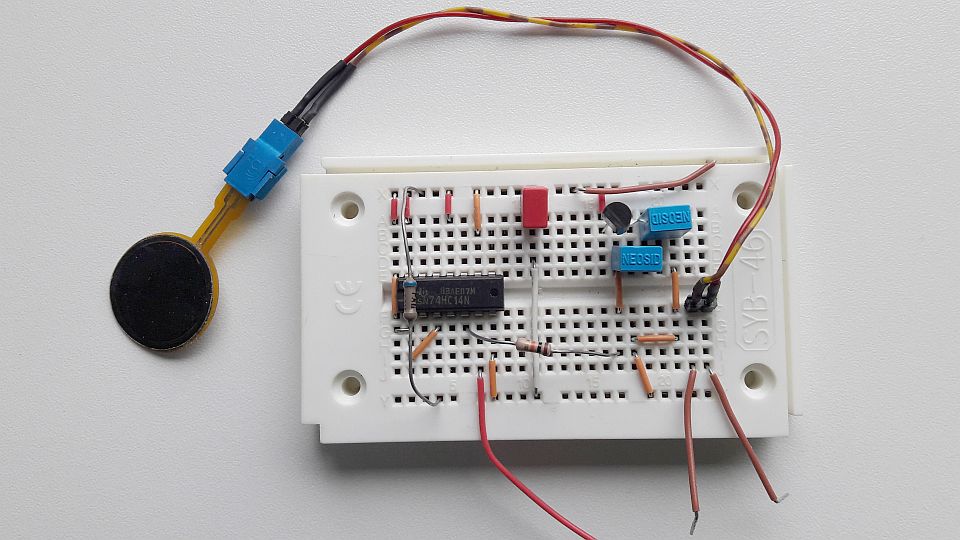
Probeweise wurde ein L-C-Oszillator mit 74HC14 aufgebaut.
Seine Speisespannungs-Abhängigkeit ist brauchbar.
Ein konventioneller Colpitts-Oszillator könnte evtl. besser arbeiten.
R1 verringert die Speisespannungs-Abhängigkeit,
weil der Verbindungspunkt
des Serienresonanz-Schwingkreises, an dem sich so eine Amplitude von 10..20 V
aufbauen kann, weniger behindert wird.
Leider erhöht dieser die Betriebsstromaufnahme von <1 auf 5 mA.
C1 trennt den Gleichspannungsanteil vom Sensor ab.
Prinzipiell ließe sich so parallel der Widerstand messen.
Ein parallel angeschlossenes Multimeter hat jedoch eine
erhebliche Parallelkapazität.
Beim zweiten Versuch wurde der Oszillator in
Hartley-Schaltung
mit SFET realisiert.
Mit dem altbekannten BF245 wollte dieser nicht so recht,
mit einem 2SK170 lief der Oszillator in der angegebenen Dimensionierung
problemlos.
Der Vorteil der Hartley-Schaltung (induktiver Spannungsteiler oder Spartrafo) gegenüber der Colpitts-Schaltung (kapazitiver Spannungsteiler) ist das Vermeiden des Einbringens von Zusatzkapazitäten. Seine Speisespannungsabhängigkeit ist erfreulich und ausreichend gering, allerdings fraß dieser einen Strom von 25 mA. Der Abgriff der Oszillatorspannung erfolgt hochohmig über einen Widerstand, besser noch über einen Hochpass mit Mittenzentrierung der Gatter-Eingangsspannung.
231106: Für die gewünschte Oszillatorfrequenz wird die Spule zu unhandlich groß. Und für einen RC-Relaxationsoszillator mit 74HC14 die Betriebsspannungsabhängigkeit der inneren Schaltschwellen zu unkalkulierbar. Daher tendiere ich zu einer Neukonstruktion mit echtem Komparator mit CMOS-Ausgang und Außenbeschaltung zum Schmitt-Trigger-Verhalten mit 4 Widerständen. Für geringe gegenseitige Abhängigkeit durchaus mit Einzelkomparatoren. Für fünf Eingänge kämen so 5 Stück TC75S57F infrage. Als Erprobungsschaltung tut's auch ein LM393 mit nachgeschaltetem CMOS-Treiber zur Simulation des Push-Pull-Ausgangs.
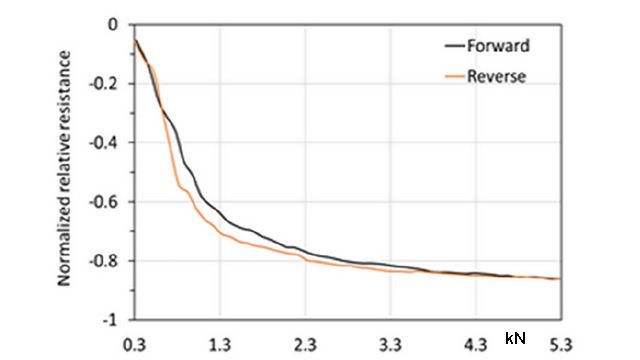
Das Problem mit diesem Sensor ist, dass der Widerstand
eher exponenziell als linear ist.
Entweder, der Sensor wird mit einer Kraft F0
vorbelastet, um einen einigermaßen linearen Teilabschnitt zu gelangen,
oder es wird ein Festwiderstand parallel geschaltet.
Auch eine Lösung ist es, den Leitwert auszunutzen,
d.h. den Sensor in den „Nenner“ eines Spannungsteilers einzusetzen.
Ratiometrische A/D-Wandlung bietet sich in jedem Fall an.
Für die Messreihen mit statischer Kraftbelastung (siehe Foto vom Versuchsaufbau) wurde ein gewöhnliches Handmultimeter UT131A verwendet.
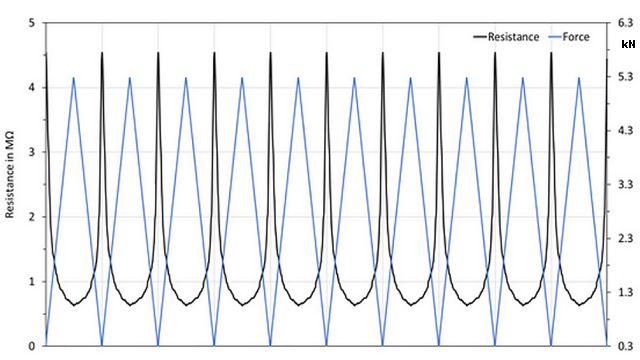
Zusammengefasst: Der Sensor hat eine elende zeitliche Drift und ein „Gummiverhalten“ mit Zeitkonstanten im Sekunden- oder Minutenbereich. Zudem ist eine deutliche Hysterese wahrnehmbar. Die Messungen müssen wahrscheinlich mit Kurzzeitbelastungen (< 1 s) wiederholt werden. Dazu ist für die Widerstandsmessung ein schneller abtastendes Messgerät erforderlich, das Handmultimeter ist zu träge. Der Frequenzmesser HM8021.4 mit Abtastrate 10 Hz ist hingegen fix genug.
Rätselhafterweise liefern die Widerstandsmessungen bei steigender Kraft steigende Werte!! Ganz im Gegensatz zu dem, was man mit der Daumenprobe ermittelt. Zunächst wurde von ungleich verteilten Druckkräften in der Parallel-Presse ausgegangen; mit einer Scheibe Gummi in Sensorgröße als Kraftverteiler kommt jedoch das gleiche Ergebnis heraus.
Was gemessen werden soll sollte noch mal mit dem Sensor-Entwickler abgesprochen werden. Derzeit tendiere ich zu der (komplizierten) Lösung mit dem Hartley-Oszillator.
231103: Die Widerstandsmessung ist nur für kleine Kräfte (lt; 6 N) zulässig und sinnvoll. Da die Kapazitätsänderung einen größeren Kraft-Bereich abdeckt, wird diese bevorzugt. Als Oszillatorfrequenz werden 10..50 kHz festgelegt. Die Abtastrate soll 600 Hz .. 1 kHz betragen, um (Öl-)Druckwechsel während der Überfahrt zu erfassen. Das erfordert IMHO eine Kombination aus Frequenz- und Periodendauermessung und erfordert faktisch einen Mikrocontroller. Die Anordnung auf der Führungsbahn ist auf 5 Stück festgelegt, entweder linear oder wie Olympiaringe. Jeweils im Durchmesser von 1 cm; Abweichungen von der Kreisform sind möglich. Die Kontaktierung kann durch 5 kleine, in jedem Fall linear angeordnete Löcher nach unten erfolgen. Anfertigung, Bestückung und Verguss der Sensortaschen ist nicht mein Bier, macht die mechanische Werkstatt.
Meine Aufgabe:
Da bei den geforderten 50 kHz eine Lösung mit LC-Schwingkreis zu einer
unhandlich großen Induktivität führt und dabei der Kreiswiderstand
√
Daher strebe ich nun eine Lösung mit Synchrongleichrichter an. Durch die Ansteuerung der Polaritätsumkehr mit einem 90° phasenverschobenen Signal wird der Wirkstrom durch die Probe ausgeblendet. Kann man als Analogrechner sehen, der vom Strom nur die Blindkomponente herausrechnet:
Der A/D-Wandler nach dem Tiefpass für die EDV
kann mit bequem niedriger Abtastrate, bspw. 1 kHz, betrieben werden,
und eine weitere (digitale) Signalverarbeitung ist nicht erforderlich.
Statt mit Mikrocontroller und I²C-Anschluss (4-poliges Kabel) kann die Platine auch mit SubD9-Buchse versehen rein mit Analogsignalen betrieben werden: Ein externer Oszillator mit 5 VSS liefert dann die Wechselspannung, und die 5 Analogspannungen im Bereich 0..1 V können mit irgendeinem A/D-Wandler weiterverarbeitet werden. Die Beschaltung der OPVs muss für den Gesamt-Maximalstrom (aus R und XC des Sensors) dimensioniert werden, der Tiefpass am Ausgang liefert dann nur den wesentlich kleineren XC-Anteil. Daher muss die Spannungsversorgung symmetrisch sein. Mit dem TL07x als Operationsverstärker und 74HC4066 (nicht CD4066B) als Analogsignalschalter sollten 100 kHz Trägerfrequenz als Maximum verarbeitbar sein.
Das Routing auf Probe ergab eine Platinengröße von 40×15 mm², zweilagig, beidseitig mit SMD-Bauteilen 0603 bestückt. Diese muss, dicht bei den Sensoren platziert, unter die Führungsschiene passen. Der Einsatz von Einzelgattern hilft dabei.
Als Operationsverstärker dienen moderne Rail-To-Rail-Typen mit niedriger Versorgungsspannung, hier MC6004. Hier 1 MHz Verstärkungsbandbreiteprodukt. Für 10 MHz tun es MC6024.
CAD-Daten Mit Firefox können die Layouts im Brauser betrachtet werden. Andere Brauser sind verkrüppelt, können kein XSLT mehr ausführen.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}