
Zur flexiblen Konfigurationsmöglichkeit jedes einzelnen Rechners ist ein Aufbau eines entsprechenden Steuergerätes sinnvoll.
Für einen Bootloader mit seinem begrenzten Peripheriezugriff (nur PC-BIOS vorhanden) gibt es folgende Möglichkeiten der Fernsteuerung:
Zur Steuerung jener Schaltungen wird trotzdem diese Lösung gebraucht! Es geht nicht wirklich einfacher! Allenfalls eine serielle und/oder bidirektionale Steuerdatenübertragung (über weniger Optokoppler) wäre machbar, aber allzu viel spart das nicht an Schaltungsaufwand.
Eine Lokal-Tastatur- und -Maus-Fernsteuerung wäre damit als interessante Erweiterung möglich, daran habe ich bis 2/2012 noch gar nicht gedacht!
Auch könnte man handelsübliche USB-PS2-Adapter verwenden. Auf Optokoppler müsste man verzichten (weil bidirektional ungünstig zu lösen).
Wie man es auch dreht, ein mikrocontroller-gesteuerter Boot-Selektor dieser Bauform ist durchaus zukunftsfähig.
telnet-bedienbares Text-Interface,
welches kompatibel zu D2S ist
und damit eine
DDE-Steuerbarkeit zulässt.
Zum Einsatz kam eine Ethernut-Platine. Diese beinhaltet einen Strom sparenden Mikrocontroller ATmega128 sowie einen RTL8019 als Ethernet-Controller. Vorkonfiguriert ist dabei ein Nut/OS bezeichnetes Betriebssystem mit einem kleinen Web-Server sowie dem dazu notwendigen TCP/IP-Stack. Die Stromversorgung erfolgt wahlweise über ein externes Steckernetzteil (Standard-Hohlbuchse, 9 V, 500 mA) oder – wie im Bild zu sehen – über Power-over-Ethernet (PoE).

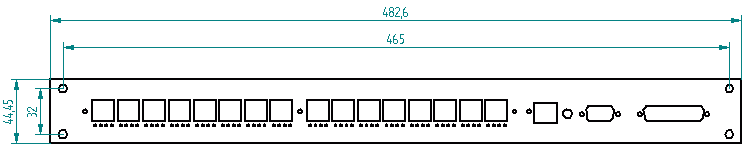
Der mechanische Aufbau erfolgte als 19"-Gerät, wobei die Frontplatte aus 2 mm dickem Stahlblech per Wasserstrahl ausgeschnitten wurde. Über vier Haltequader sind die Leiterplatten mit der Front verbunden. Deckel und Bodenplatte aus Pertinax bilden eine Schutzhülle – fertig ist das 19"-Gehäuse. Die Beschriftung erfolgte mittels Typofix (aus DDR-Zeiten!) und Fixierung mittels Klarlack aus der Spraydose.

Die rote Platine ist die Ethernut-Platine. An dieser ist ein 25-pol. SubD-Stecker „ISP“ derart angeschlossen, dass über ein paralleles Verlängerungskabel direkt der ATmega128 mittels gängiger Software (PonyProg2000, avrdude) programmiert werden kann. Die 9-pol. SubD-Buchse ist für die Diagnose. Hier kann über ein Verlängerungskabel die serielle Schnittstelle des PCs angeschlossen werden. Die Diagnose kann bspw. mittels HyperTerminal erfolgen.
Von der Ethernut-Platine wurden vier Stifte entfernt, um die Hosenträgerkabel aufstecken zu können. Der PoE-Anschluss ist seitens Ethernut nicht direkt vorgesehen und ist daher durch Anlöten von Drähten auf der Platinenunterseite realisiert.

RJ-45-Buchsen wurden gewählt, um Platz zu sparen und netzwerk-typische Komponenten zu verbauen. Die notwendigen Adapterkabel auf SubD25♂ wurden durch maßvolles Halbieren von 10 m langen Patchkabeln gewonnen.
Die Vorlage für die Haltequader aus Messing sowie deren Zeichnung wurde ebenfalls mittels Solid Edge erstellt.
Die übrigen Teile sind Standardkomponenten wie Stehbolzen und M3-Schrauben.
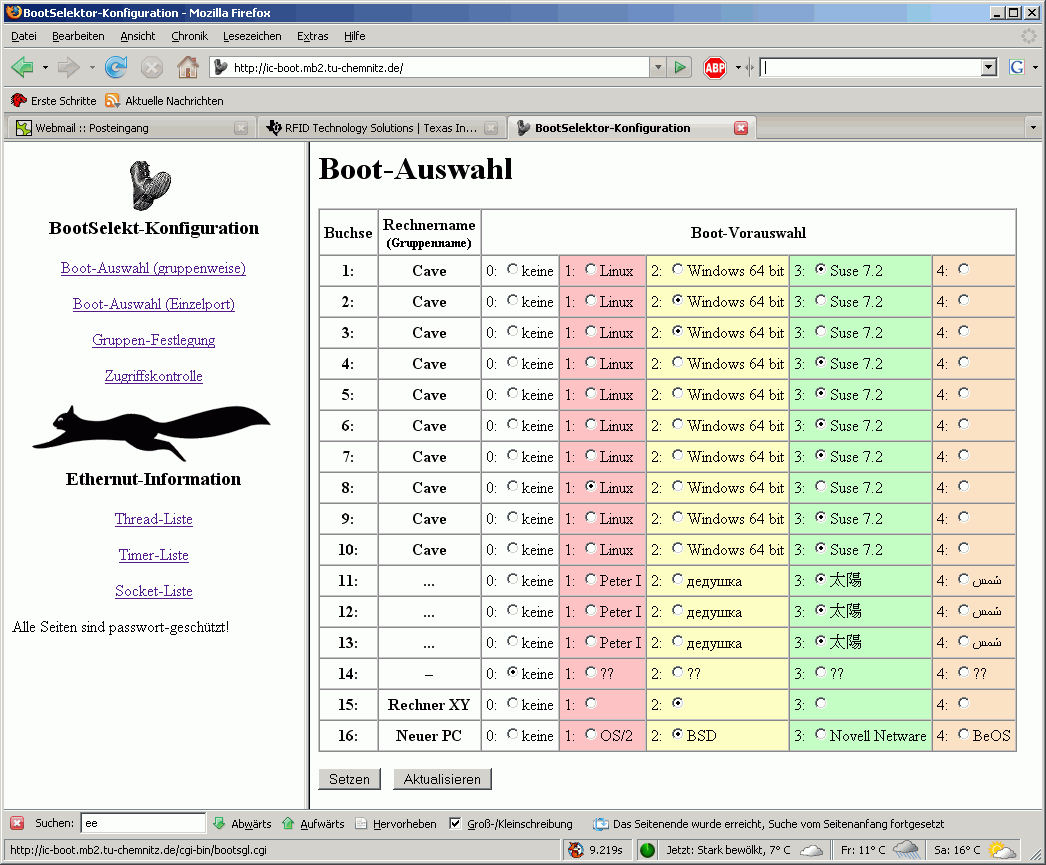
Da die Steuerparameter des Formulars mit der Methode „GET“ übertragen werden,
ist die Steuerung auch mittels wget möglich.
Zusätzlich enthalten ist ein einfaches telnet-Interface.