
Hiermit ist kein Hexapod im Sinne eines Laufroboters (Spinne) gemeint!
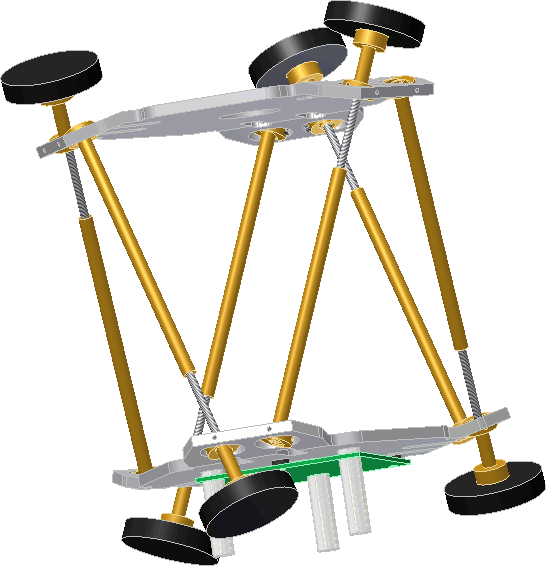
Kleines, einfach herstellbares Hexapod (englisch: „Steward Platform“) für Optiktisch, für Mikroskop-Positionierung.
Kompromiss: Ideal sind längliche Schrittmotoren mit Hohlwelle. Gab es aber nicht zu kaufen. Mit den Außenmotoren braucht das Konstrukt mehr Platz.
Gewählte Größe: Erste Version mit 100 mm Achslänge, „integrierte“ Kardangelenke, Außenmotoren.
Ziel: Kompaktes Design „all in one“ mit integrierter Steuerungselektonik.
Handbedienung via kabelgebundener Lokalbedienung und/oder USB.
Ausgangspunkt waren Schrittmotoren von Pollin für 2,95 € pro Stück. Bestellnummern 310396, 310397 (ohne Schaltregler!) oder 310411. Diese haben eine 2-mm-Achse mit aufgepresstem Messingritzel, welches abzuziehen (Sonderwerkzeug!) ist. Dazu kommt je eine Ansteuerplatine mit nützlichen Bauelementen für das Hexapod:
Konstruktionszeichnungen als Quelle und PDF: siehe unten. Zum Schmökern hier ein paar Bilder:
| Stückzahl | Bild | Bauteil (für großes Bild anklicken) | |||
|---|---|---|---|---|---|
| 12 |  | Gelenkring (Messing oder Stahl) | 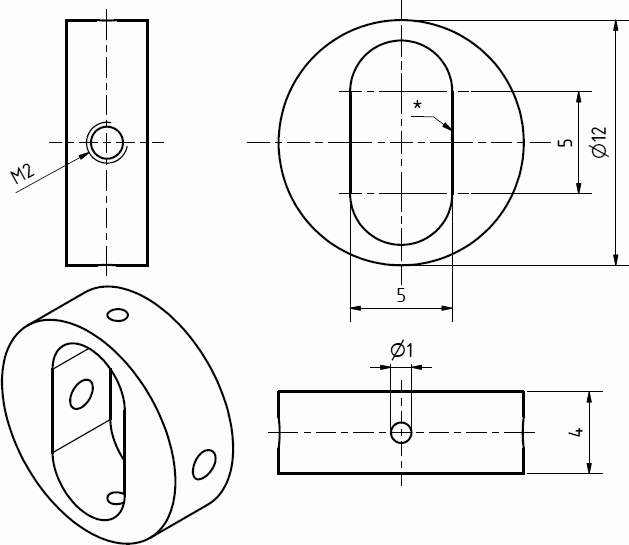
| ||
| 6 |  | Spindel (Stahl-Gewindestange, Gesamtlänge 130 mm) | |||
| 6 |  | Spindelhülse (Messingrohr, mit RG58-Crimpzange bearbeitet) | |||
| 6 |  | Motorhülse (Messing, Drehteil) | |||
| 2 |  | Plattform (Alublech) | |||
 | Plattform (Detail) | ||||
| 3 |  | Stehhülse (Fuß) (Stahl- oder Alurohr) | |||
| 3 | Inbus-Zylinderschraube M6 x 50 + je 2 Unterlegscheiben (Normteile, ohne Bild) | ||||
| 48 |  | Madenschraube M2 x 6 mit Zapfen (Normteil)
| 6 | ) Schrittmotor von Pollin (siehe oben)
| |
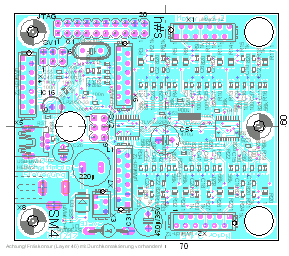
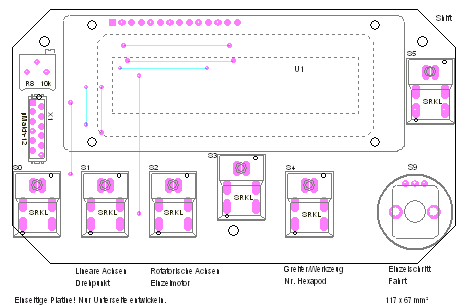
Ansteuerschaltung mit AT91SAM7S64 (ARM7, 32-bit-Mikrocontroller), USB und Mikroschrittbetrieb, kaskadierbar im Master-Slave-Betrieb per RS485 (bis zu 8 Stück), mit Koordinatentransformation in Firmware.
Bug:
Zu dieser Steuerung gehört eine Lokalbedienung
mit 1 Inkrementalgeber, bis zu 6 Tasten, bis zu 6 Leuchtdioden
sowie 1 alphanumerisches LC-Display 16x2.
Das Leiterplatten-Design erfordert industrielle Fertigung
(hier: Würth-Elektronik WE-Direkt).
Trotz der dichten Bestückung ist sie nur zweilagig.
Die Lokalbedienungseinheit (einseitig) kann selbst geätzt werden.
![[3D-Ansicht]](sm4t.3d.png)
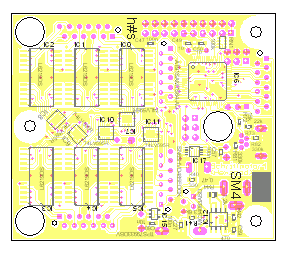
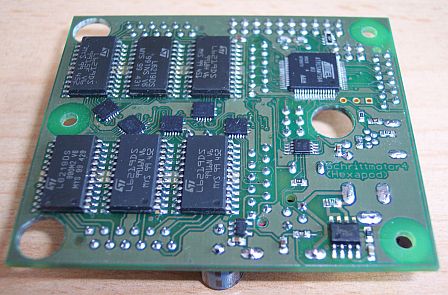
![[3D-Ansicht]](sm4b.3d.png)
Die Bauelemente kamen:
Die Verwendung von No-Clean-Lötpaste ist für die kleinen SMD-Bauteile auf der
Unterseite der Leiterplatte angeraten.
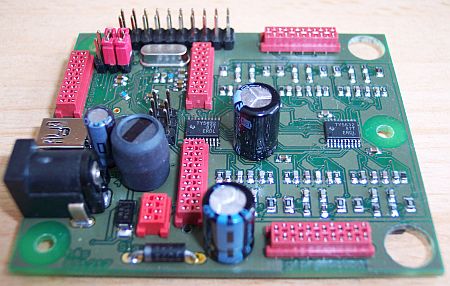
Die Schrittmotortreiber-Schaltkreise (2 Vollbrücken mit Konstantstromregelung)
werden über ein Wärmeleitpad am unteren Aluminiumblech (Fußseite) gekühlt.

Die farbliche Anordnung der Tasten ist absichtlich für
Ja/Nein-Abfragen
aus dem 2-zeiligen LC-Display
Orientiert sich an der Motorsteuerung mit ATmega8.
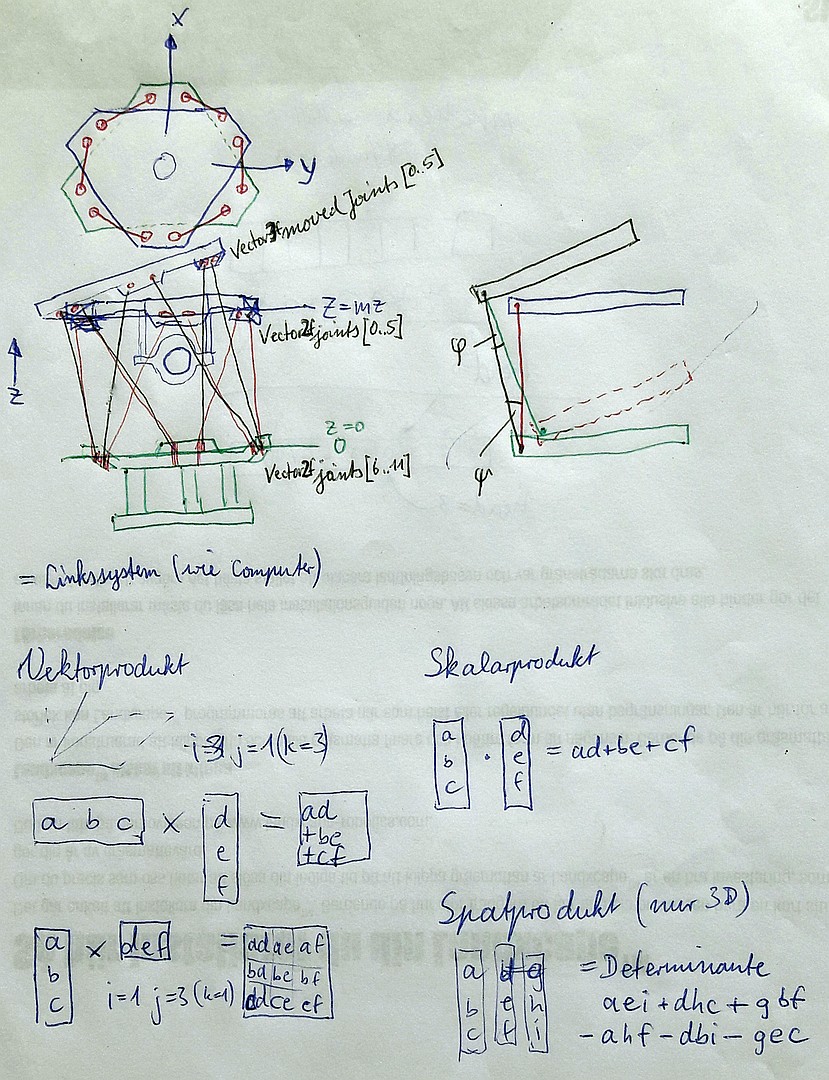
Neu ist, dass der leistungsstärkere Mikrocontroller die Bewegung
auf alle 6 Motoren per Strebenlängenberechnung aufteilt.
Dadurch entfällt die Basiseinheit „Schritt“ und die Standardschrittlänge ist 1/10 mm bzw. 1/1024 Vollkreis.
Vorgesehen ist der aufrechte Betrieb mit Kamera zur Seite blickend.
Das hängt mit der Reihenfolge der Drehtransformationen
(3! = 6 mögliche) zusammen.
Die Firmware verwendet Eulerwinkel,
nicht Quaternionen zur Interpolation:
Über große Winkel können sich unerwartete Bewegungskurven entpuppen.
Am USB-Anschluss wird eine WebUSB-Äpp bereitstehen,
die die Bedienung mit dem Smartphone ermöglicht,
falls keine Lokalbedienung oder kein PC vorhanden ist.
Serielle Schnittstellen sind mega-out.
| Name | Letzte Änderung | Größe | Beschreibung |
|---|---|---|---|
| CAD-Modell.zip | 2010-01-28 | 3.0M | Konstruktion in ProE |
| Eagle.zip | 2012-02-17 | 289K | Eagle-Quellen |
| HexMotion.zip | 2025-08-05 | 628K | Irgendwelches Windows- und MFC-Gedöhns, nicht von mir |
| Hexapod.pdf | 2009-11-19 | 82K | Konstruktionsmodell des Hexapods, Aktionsbereich 100 mm |
| Zeichnungen.zip | 2010-01-28 | 2.8M | Zeichnungsblätter, auch als PDF |
| firmware.zip | 2025-08-26 | 129K | Firmware-Quelltexte |
Im Jahr 2025 genauso? Der mechanische Aufbau ist in dieser (Miniatur-)Größenordnung noch nicht so recht mit einem 3D-Drucker realisierbar. Als Mikrocontroller käme STM32F4xx zum Einsatz. Der hat Gleitkomma eingebaut und ist wesentlich einfacher softwareseitig zu handhaben. Er ist deutlich Energie sparender und obendrein schneller. Sowie billiger. Nur nicht überall 5V-tolerant. Als USB-Buchse kommt nur noch USB-C infrage. Die Schrittmotortreiber können in etwa so bleiben. Die Stromversorgung via Hohlbuchse und MC34063 erscheint altbacken aber immer noch brauchbar.
{kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
{kind=link}