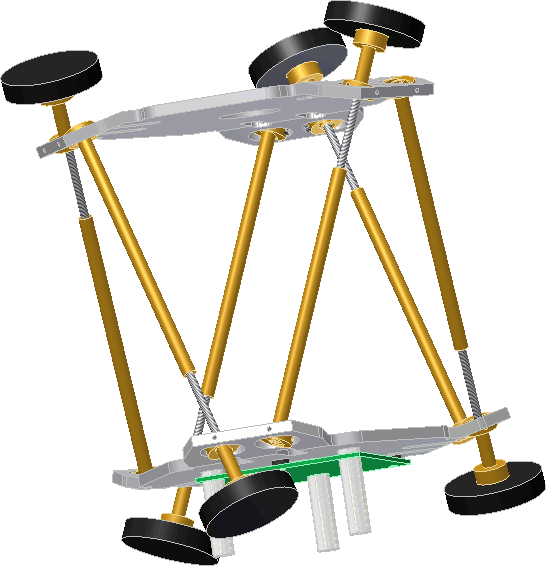

Kritisch bei diesem Aufbau ist allenfalls die präzise Fertigung der 12 Gelenkringe. Konstruktionsunterlagen siehe unten. Zur Fertigung ist eine Fräsmaschine oder eine Drehmaschine mit angetriebenem Werkzeug erforderlich.
Ausgangspunkt sind Schrittmotoren von Pollin für 2,95 € pro Stück. Bestellnummern 310396, 310397 (ohne Schaltregler!) oder 310411. Diese haben eine 2-mm-Achse mit aufgepresstem Messingritzel, welches abzuziehen (Sonderwerkzeug!) ist. Dazu kommt je eine Ansteuerplatine mit nützlichen Bauelementen für das Hexapod:
{kind=link}
- Motorsteuer-IC L6219DS mitsamt notwendigem Fußvolk in SMD 0603, Strommesswiderstand 1 Ω 0805
- Schaltregler mit MC34063A mitsamt Fußvolk für 5-V-Tiefsetzsteller
- SDRAM (2 MByte) und schneller A/D-Wandler (12 MSa/s) für eine USB-Datenakquisitionskarte
Konstruktionszeichnungen als Quelle und PDF: siehe unten. Zum Schmökern hier ein paar Bilder:
| Stückzahl | Bild | Bauteil (für großes Bild anklicken) | 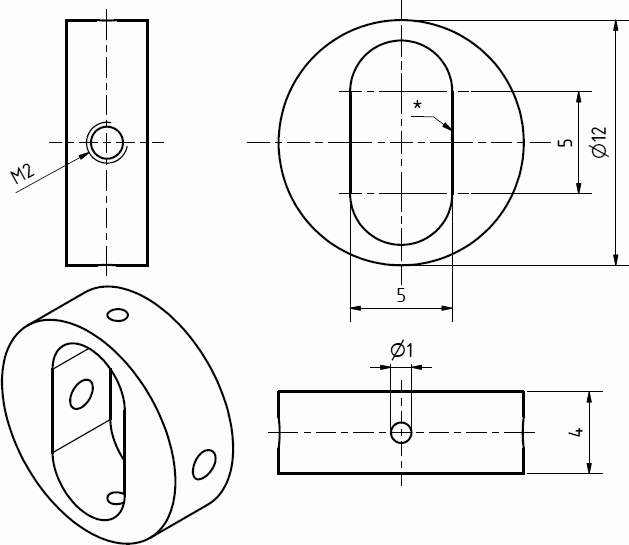
| ||
|---|---|---|---|---|---|
| 12 |  | Gelenkring (Messing oder Stahl) | |||
| 6 |  | Spindel (Stahl-Gewindestange, Gesamtlänge 130 mm) | |||
| 6 |  | Spindelhülse (Messingrohr, mit RG58-Crimpzange bearbeitet) | |||
| 6 |  | Motorhülse (Messing, Drehteil) | |||
| 2 |  | Plattform (Alublech) | |||
 | Plattform (Detail) | ||||
| 3 |  | Stehhülse (Fuß) (Stahl- oder Alurohr) | |||
| 3 | Inbus-Zylinderschraube M6 x 50 + je 2 Unterlegscheiben (Normteile, ohne Bild) | ||||
| 48 |  | Madenschraube M2 x 6 mit Zapfen (Normteil)
| 6 | ) Schrittmotor von Pollin (siehe oben)
| |
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
){kind=link}
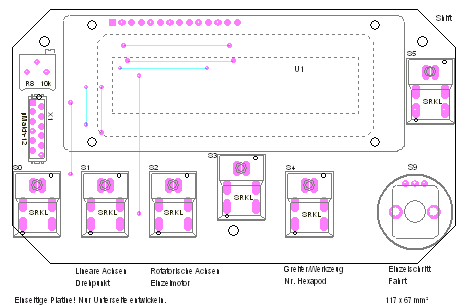
Zu dieser Steuerung gehört eine Lokalbedienung mit 1 Inkrementalgeber, bis zu 6 Tasten, bis zu 6 Leuchtdioden sowie 1 alphanumerisches LC-Display 16x2.
Das Leiterplatten-Design erfordert industrielle Fertigung (hier: Würth-Elektronik WE-Direkt). Die Lokalbedienungseinheit (einseitig) kann selbst geätzt werden.
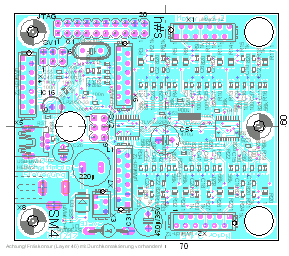
![[3D-Ansicht]](sm4t.3d.png)
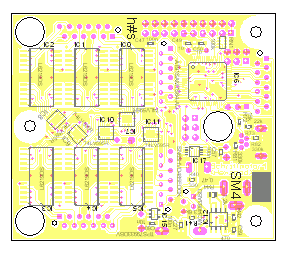
![[3D-Ansicht]](sm4b.3d.png)
So sieht die Haupt-Leiterplatte in Eagle3D aus
- von der oben genannten Pollin-Leiterplatte (mit Heißluft abgelötet)
- als kostenlose Muster von Texas Instruments
- von Reichelt
Die Verwendung von No-Clean-Lötpaste ist für die kleinen SMD-Bauteile auf der Unterseite der Leiterplatte angeraten.
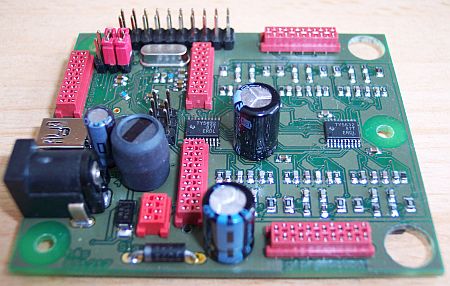
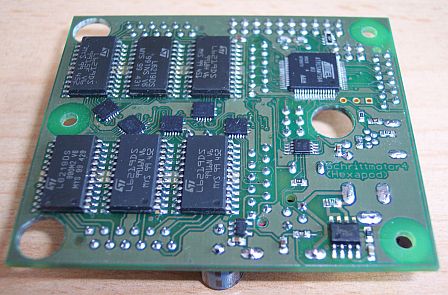
Gelötete, voll bestückte Leiterplatte (links: oben, rechts: Unterseite mit Schrittmotortreibern)

Aufgebaute Lokalbedienung, im Reichelt-Gehäuse GEH KSW 20.
Die farbliche Anordnung der Tasten ist absichtlich für
Ja/Nein-Abfragen
aus dem 2-zeiligen LC-Display