Eine Apparatur zum Erlernen des richtigen Hammerschlags
bei Operationen an (künstlichen) Hüftgelenken.
Eingebettet in einer
AR-Anwendung,
an deren Entwicklung ich nicht beteiligt war.
Doch dazu kam ich nur scheibchenweise, um schließlich
doch alles machen zu müssen.
Abgesehen von der Mechanik.
Das Bedienteil will irgendetwas standardisiertes sein,
tatsächlich entpuppt sich die Parametrierungsschnittstelle
als closed-source
sowie (absichtlich?) falsch dokumentiert:
Die im Datenblatt angegebene Baudrate stimmt nicht.
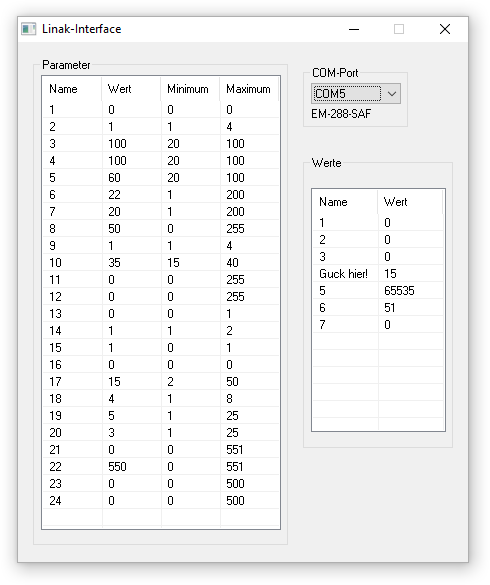
Screenshots beim „Wert abfragen“, als Tabelle
burst1 und burst2
Gleich zu Anfang stellt sich heraus:
4800 Baud, 8 Datenbits, gerade Parität, 1 Stoppbit, nichtinvertiert, TTL
(d.h. das Startbit ist Low)
Das Bedienteil fragt an, das Steuerteil antwortet umgehend
Interrupt wird nicht benutzt
Der „burst1“ erschließt sich durch scharfes Hingucken.
Dabei ist [0A] die String-Länge.
Das [0B] vermutlich die Paket-Länge; hier nur 1 Sub-Item.
Die anderen Konstanten werden wohl nicht entzifferbar (= bedeutungslos) bleiben.
Unklar ist noch, warum der burst1 mit einem unbeantworteten [01] endet.
Könnte sein dass das bereits zum burst2 gehört.
Der „burst2“ ist ebenfalls entziffert.
Darin ist vermerkt, wieviele Parameter und Werte es gibt, und welche 8 Bit und welche 16 Bit breit sind.
Daraus ergibt sich die Einschränkung, dass 16-Bit-Parameter stets hinter allen 8-Bit-Parametern
angeordnet sein müssen; das gleiche für die Werte.
Und dass es maximal 79 (Parameter + Werte) geben kann, da Parameter 1 auf „Adresse“ 21 und Folgebytes
von Mehrbyte-Werten auf „Adresse“ 100 (jeweils dezimal) abgefragt werden.
Da auf dem Zielrechner das LabVIEW streikt, wurde kurzerhand das Programm
in C++ in Visual Studio 6 erstellt.
Alle Werte werden korrekt angezeigt.
Die Zeilentitel können vom Anwender geändert werden und werden persistent
je nach angeschlossener Steuerung (Name als Referenz) in der Registrierung gespeichert.
Die Parameter können vom Anwender zwar editiert werden,
werden jedoch noch nicht zur Steuerung zurückgeschrieben.
Ein Tastaturinterface zum Umbenennen der Zeile bzw. zur Wertänderung ist (seitens Windows)
nicht vorhanden, wird wohl noch mit
F2 bzw. F3 realisiert (Explorer-kompatibel).
Screenshot des Test- und Überwachungsprogramms
Das gesamte Teilprojekt, den Linak-Servo zu
„reverse-engineeren“
erwies sich nachfolgend als hinfällig,
da die entscheidende Steuerungsgröße Kraft nicht verfügbar ist
und die Alternative Weg nur per Analogwert vorgebbar ist.
Nun kommt die Katze aus dem Sack:
Der Linak-Servo dient dazu, eine Fahrradbremse anzuziehen.
Da sich alles bloß nicht die Stellkraft und die Position des Servos
digital einstellen lässt, müssen mechanisch federnde Elemente dazwischen
(Hebel, Bowdenzug) die Proportionalität von Weg und Kraft herstellen
und ein Analogwert legt die Position fest.
Der FT232R-Adapter wird wieder frei und durch die Firmware des Arduino(?) ersetzt.
Zum Einsatz kam schließlich ein Board mit STM32F103.
Und eine Firmware mit WebUSB für die Funktionsdarstellung im Browser.
Hinfällig:Da dies nicht ohne Bauchschmerzen mit einem Arduino Uno geht,
tendiere ich umgehend zu meinem Liebling Arduino Leonardo
mit nativem USB-Interface.
Das Computerprogramm soll in LabVIEW laufen und mit dem Versuchsaufbau
über USB (genau 1 Kabel) kommunizieren.
Zusätzlich soll noch eine mit einem Hammer einwirkende Kraft
gemessen werden.
Im Vorversuch wurde eine Abtastrate von 20 kSa/s als
geradeso ausreichend festgelegt,
um den Kraftstoß zu erfassen.
Eine geeignete Kraftmessdose mit Dehnmessstreifen wurde
konstruiert, aufgebaut und eingebaut.
Zur Erfassung des Kraftstoßes fallen die üblichen Wägezellenverstärker
mit Sigma-Delta-Umsetzer aus; diese sind viel zu langsam.
Und ein Verschiebeweg wird mit einem digitalen Messschieber aufgenommen.
Der misst nur langsam; die Position vor und nach dem Hammerschlag
genügt. Die üblichen Messchieber haben 1/100 mm = 10 µm Auflösung.
Siehe auch caliper2pc.
Schließlich soll die Festhaltekraft (Bremskraft)
außer durch das Computerprogramm auch analog an einem Potenziometer
eingestellt werden können.
Die Linak-Steuerung benötigt zudem ein Netzteil mit 24 V und 2,2 A.
Dass diese ihrerseits 5 V liefern kann wird hier nur genutzt,
um der Steuerung einen Analogwert vorzugeben.
Gesamtschaltung mit Entwicklungsboard basierend auf STM32F103C8T6
Der allfällige Vorverstärker für die Kraftmessdose
mit OPA2376 verstärkt das Brückenausgangssignal
um den Faktor 300, allein mit R4 einstellbar.
R2 dient zum Brückenabgleich.
Durch die Gegenkopplung des OPV arbeitet die Brücke im Kurzschlussbetrieb,
und es wird effektiv der Diagonalstrom in eine Spannung gewandelt.
Hinfällig:Die Variante mit dem teureren und größeren
Arduino Micro
verwendet den differenziellen A/D-Wandler mit umschaltbaren Verstärkungen
(×1, ×10, ×40 und ×200),
um verschieden starke Schläge angemessen erfassen zu können.
Leider bleiben dann nur 8 Bit Auflösung laut Datenblatt übrig,
und man muss die Schlagstärke a priori kennen.
Die Variante mit dem chinesischen
Pro Micro
verwendet einen Instrumentationsverstärker und muss asymmetrisch messen,
da bei diesem weder ADC0 noch ADC1 (noch AREF) herausgeführt ist.
Dafür gibt es 10 Bit Auflösung.
ATmegas sind für die Abtastung des Kraftstoßes etwas überfordert.
Externe A/D-Wandler erscheinen Overkill.
Daher tendiere ich nun eher zur Verwendung eines STM32F103C8T6 auf einem
Bluepill-Board. (Liegt schon zu Hause herum.)
Den fälligen USB-Seriell-Konverter, den man leider zum Betanken
dieses Boards benötigt, gewinne ich vom FT232R-Adapter für den Linak-Servo.
Der 12-bit-A/D-Wandler schafft 1 MSa/s, und es sind zwei davon drin.
Leider nicht differenziell, daher Single-Ended-Konvertierung
mit OPA2376 + INA155 (liegen herum, waren wohl kostenlose TI-Muster gewesen).
Das USB-Interface wird wieder als WebUSB implementiert.
Um Betriebsspannungskollisionen auszuschließen liefert der Linak-Servo
die 5 V für den Verstärker vom PWM-Ausgang:
Die Linak-Steuerung bekommt einen Analogwert nur dann,
wenn diese auch 5 V liefert, also eingeschaltet ist.
So kommt die gesamte Schaltung ohne wacklige 5 V vom USB aus,
sondern vom 3,3-V-Festspannungsregler auf dem BlackPill-Board.
Hoppla, ich hatte wohl die schwarze und nicht die blaue Pille genommen!
Da unterscheidet sich die Pinbelegung ganz erheblich!
Die Pin-1-Festlegung der Stiftleisten erscheint willkürlich,
ich habe es hier wie bei DIL-Schaltkreisen umlaufend nummeriert.
Blue Pill und (von mir so genannt) Black Pill im Vergleich
Zur besseren Übersicht über herausgeführte Pins
und deren Sonderfunktionen diese sortierbare Tabelle — Angaben ohne Gewähr:
Pinzuordnung STM32C8T6 vs. BluePill-40 / BlackPill-34. Graue Funktionen bei Pin-Remap
LQFP48
Sonderfunktion
Portpin
5V?
UART
I²C/SPI
PWM
ADC
BluePill-40
Label
BlackPill-34
1
UBAT
1
VB
-
2
Tamper-RTC
PC13
n
2, Blaue LED nach UDD
C13
4
3
Osc32 In
PC14
n
3, Quarz 32 KHz
C14
Quarz 32 KHz
4
Osc32 Out
PC15
n
4, Quarz 32 KHz
C15
Quarz 32 KHz
5
Osc In
PD0
n
Quarz 8 MHz
6
Osc Out
PD1
n
Quarz 8 MHz
7
Reset
n
17
R
5
8
GNDA
19, 20, 39
G
1
9
UDDA
18, 40
3V3
33
10
WakeUp
PA0
n
Cts2
T2C1ETR
0
5
A0
6
11
PA1
n
Rts2
T2C2
1
6
A1
7
12
PA2
n
Tx2
T2C3
2
7
A2
8
13
PA3
n
Rx2
T2C4
3
8
A3
9
14
PA4
n
Ck2
SS1
4
9
A4
10
15
PA5
n
SCK1
5
10
A5
11
16
PA6
n
MISO1
T3C1/T1BKI
6
11
A6
12
17
PA7
n
MOSI1
T3C2/T1C1
7
12
A7
13
18
PB0
n
T3C3/T1C2
8
13
B0
14
19
PB1
n
T3C4/T1C3
9
14
B1
15
20
Boot1
PB2
n
21
PB10
j
Tx3
SCL2
T2C3
15
B10
16
22
PB11
j
Rx3
SDA2
T2C4
16
B11
17
23
GND
19, 20, 39
G
1
24
UDD
18, 40
3V3
33
25
PB12
j
Ck3
SS2/SMBAI2
T1BKI
21
B12
18, LED nach UDD
26
PB13
j
Cts3
SCK2
T1C1
22
B13
19
27
PB14
j
Rts3
MISO2
T1C2
23
B14
20
28
PB15
j
MOSI2
T1C3
24
B15
21
29
MCO
PA8
j
Ck1
T1C1
25
A8
22
30
PA9
j
Tx1
T1C2
26
A9
23
31
PA10
j
Rx1
T1C3
27
A10
24
32
USBD-
PA11
j
Cts1
T1C4
28, USB
A11
25, USB
33
USBD+
PA12
j
Rts1
T1ETR
29, USB
A12
26, USB
34
TMS
PA13
j
X4-2
DIO
X4-3
35
GND
19, 20, 39
G
1
36
UDD
18, 40
3V3
33
37
TCK
PA14
j
X4-3
SCK
X4-2
38
TDI
PA15
j
SS1
T2C1ETR
30
A15
27
39
TDO
PB3
j
SCK1
T2C2
31
B3
28
40
RST
PB4
j
MISO1
T3C1
32
B4
29
41
PB5
n
SMBAI1/MOSI1
T3C2
33
B5
30
42
PB6
j
Tx1
SCL1
T4C1
34
B6
31
43
PB7
j
Rx1
SDA1
T4C2
35
B7
32
44
Boot0
n
45
CANRX
PB8
j
SCL1
T4C3
36
B8
2
46
CANTX
PB9
j
SDA1
T4C4
37
B9
3
47
GND
19, 20, 39
G
1
48
UDD
18, 40
3V3
33
5P
38, USB
5V
34,USB
Hinfällig:Um sich den Analogvergleicher zu sparen (leider ist keiner drin)
erfolgt die Pegelkonvertierung vom Messschieber mittels A/D-Wandler.
Der ist mit seinen 1 MSa/s eh' schnell genug.
Der STM32F103 kommt leider ohne USB-Urlader ab Werk.
Und leider ist das Angebot von Urladern aus der Arduino-Szene ungenügend.
Der beste zu findende ist ein HID-Urlader von serasidis.gr (aus Griechenland)
mit 2 KiByte Platzbedarf, leider per Jumper BOOT1 zu starten: Zu umständlich.
Eine Neukompilierung ohne Interrupts und ohne angezogene Handbremse
(hier: USB-FIFO-Größe von 8 auf 64 Byte geändert) ist nun so gestaltet,
dass man mit der Reset-Taste zum Urlader kommt;
alle anderen Reset-Ursachen (bspw. Strom weg) führen zum Anwendungsprogramm,
für das noch 62 KiByte Flash-Platz übrig bleibt.
(Auf 1 KiByte ist der Urlader wohl nur mit ARM-Assembler hinzubekommen,
wenn überhaupt. Wenn man bedenkt, dass der „Original“-Arduino-Urlader schlappe
20 KiByte wegschnappt, ist das schon ganz gut.)
Zudem waren die Programme für seriellen Zugriff (stm32flash.exe)
und HID-Zugriff (hid-flash.exe) viel zu groß;
wurden mit MSVC6 auf 1/4 der ursprünglichen Größe eingedampft,
ohne den Quelltext auszulichten.
Bei „hid-flash“ ging mir der Zwang zum COM-Port (!) auf den Keks,
dieses ist jetzt allenfalls optional, da eine Steuerung von BOOT1
nun nicht mehr erforderlich ist.
Auf einem für mich neuen Mikrocontroller etwas zu implementieren,
was auch noch an die Grenzen des Machbaren geht, ist ein Weg mit vielen
🪨 Stolpersteinen.
Das WebUSB-Interface war, ausgehend vom Urlader,
recht schnurstracks hinzubekommen.
Man muss allerdings aufpassen, dass der Controller nicht in
Interruptroutinen erstickt!
Im Gegensatz zum AVR, wo bei 100 % Interruptlast das Hauptprogramm
mit wenigstens 1 Instruktion pro Interrupt vorankommt
(also im 🐌 Schneckentempo), geht beim STM32F103 „dank“
Interruptverkettung
(tail chaining) gar nichts mehr! 🛑
Man sagt, die Hauptschleife verhungert.
Und so suchte ich den Fehler prompt an der falschen Stelle.
Bei der Entscheidung, den Analogvergleicher LM393 wegzulassen
und stattdessen den A/D-Wandler zu benutzen hatte ich mich wohl
🐎 vergaloppiert!
Denn das Taktsignal des Messschiebers kommt mit immerhin 80 kHz,
man muss es mit 200 kSa/s abtasten.
Das passt gerade so ins Taktregime, wenn man die 4 A/D-Eingänge
zyklisch abtastet, mit minimaler Abtastzeit:
Der A/D-Wandler, der mit 12 MHz getaktet wird, benötigt
14 Takte pro Kanal, das ergibt eine Kanalabtastrate von 12 MHz/14/4
= 214 kSa/s.
Aber eine Flankendetektierung pro Abtastwert geht nicht,
der Controller stirbt an Interrupt-Überlast.
Vorbereitung: Das Taktregime gewissenhaft kontrollieren,
dass der Controller, der A/D-Wandler und die übrige Peripherie
tatsächlich mit dem maximal möglichen Durchsatz läuft.
Die Lösung: Die Wandlerdaten werden en bloc von bspw.
16 Quadrupeln eingesammelt und in einer Schleife deserialisiert.
Das senkt die Interruptfrequenz und damit die Last.
Das verlustfreie Abholen der Daten erfolgt per
DMA
und Interrupts bei halbem und vollem Puffer;
die jeweils inaktive Pufferhälfte wird verarbeitet.
Der Messschieber verwendet ein 2 × 24-Bit-Binärprotokoll,
von dem nur der 2. Block ausgewertet wird.
Ein Skalierungsfaktor wird dann im WebUSB per JavaScript angerechnet.
Die Ausgabe erfolgt auf 1/100 mm.
Schließlich wurde doch noch ein LM393 spendiert,
in invertierender Beschaltung, und das Ganze an SPI1 zu betreiben.
Der Pferdefuß steckt im Detail:
Wie empfängt man mit dem Mikrocontroller 49 Bit?
Die einzige Möglichkeit, die 49. Taktflanke zu verschlucken
(= Rücksetzen des internen Bitzählers) besteht mit der Steuerung
von Slave-Select.
Aus- und Einschalten des SPI-Moduls tut's nicht!!
Im Prinzip ist eine Art Einstrahl-Oszilloskop gefragt,
bei dem 100 kSa/s genügen.
Durch den Messschieber kommen ohnehin bereits
reichlich 200 kSa/s an.
Die Triggerbedingung in Software zu realisieren
führte erneut zum Verhungern der Hauptschleife,
auch wenn man größere Blöcke verarbeitet.
Daher wurde kurzerhand das Regime so geändert,
dass der DMA-Puffer riesig ist und die Triggerbedingung
per ADC-Watchdog 🐕 läuft.
Da dazu zeitraubende Fallunterscheidungen nötig sind,
wurde das Problem dadurch gelöst, die Interruptvektortabelle in den RAM
zu verlegen und den Vektor bedarfsgerecht umzustellen.
Das funktioniert nun am Fallbeispiel einer steigenden Flanke so:
Für die Prätrigger-Zeit wird nichts gemacht.
Dazu wird der Timer3 im Einzelschuss-Modus gestartet.
Mit der Timer3-ISR
wird die Trigger-Vorbedingung am A/D-Wandler gesetzt:
Der A/D-Wert muss sich unterhalb der unteren Triggerschwelle befinden.
Der Timer3 wird deaktiviert oder zur Auto-Triggerung verwendet.
Mit dem nächsten Interrupt vom A/D-Wandler, der nur
vom Watchdog kommen kann (die Werte werden unabhängig davon per DMA abgeholt)
wird die Trigger-Hauptbedingung am A/D-Wandler gesetzt:
Der A/D-Wert muss sich oberhalb der oberen Triggerschwelle befinden.
Dazu wird die Interruptroutine für den A/D-Wandler umgebogen.
Mit dem nächsten Interrupt vom A/D-Wandler, der nur
vom Watchdog kommen kann, wird der Watchdog deaktiviert
(simplerweise durch Laden von 0xFFF in HTR)
und der Timer3 mit der Post-Trigger-Zeit im Einzelschussmodus gestartet.
Dazu wird die Interruptroutine für den Timer3 umgebogen.
Mit dem Eintreffen des Timer3-Interrupts befinden sich alle
gewünschten Sampledaten im DMA-Puffer.
Allerdings nicht in der passenden Reihenfolge; der Schnitt ist irgendwo
mittendrin:
Die Position des DMA-Schreibzeigers bekommt man durch Auswerten von CNDTR.
Diese müssen nun (leider nur per Software) aus dem Puffer
herauskopiert werden, während der DMA-Controller weitere neue
Werte hineinschreibt.
Deshalb dimensioniert man den DMA-Puffer ein bisschen größer
und beginnt beim Herauskopieren mit dem ältesten Wert.
Alternativ könnte man mit 2 DMA-Puffern arbeiten,
aber da diese viel Platz fressen, ist das nicht so toll.
Mit dem erneuten Scharfmachen des Triggers muss man wiederum
die Prätrigger-Zeit abwarten, sonst kann es passieren,
dass ein Signalverlaufsabschnitt mehrfach angezeigt wird.
Daher wird wieder Timer3 im Einzelschussmodus gestartet, und es geht
wieder von vorn los.
Damit kein Ergebnispuffer verloren geht, bevor sie zum USB gehen,
gibt es mehrere davon in einem weiteren Ringpuffer.
Es hat sich gezeigt, dass ein Hammerschlag mehrere
Triggerereignisse generiert, er prellt also wie jede Computertaste auch.
Deshalb erscheint die Pufferung wichtig.
Späterhin fiel die Entscheidung, zusätzlich oder an Stelle
des Messschiebers (mit 10 µm Auflösung)
einen Absolut-Wegsensor einzubauen.
Am einfachsten ein Potenziometer.
Denn ein inkrementeller Wegsensor, hier der Messschieber
kann beim schnellen Versetzen (per Hammerschlag) springen oder
(wahrscheinlicher) Striche verschlucken.
In Verbindung mit dem internen 12-Bit-A/D-Wandler wird eine
Auflösung von 60 mm / 4096 = 20 µm erreicht,
mit Rauschanteil verlässlich 0,1 mm, das reicht.
Damit kann man nun durch Erweiterung der Oszi-Funktion
auf „Zweistrahlbetrieb“ Kraftstoß und Verschiebung gleichzeitig
messen und verfolgen.
Die dazu notwendige Halbierung der Einzelabtastrate auf ca. 400 kSa/s
ist vertretbar.
Gefordert sind gar nur 200 kSa/s, sodass sogar Drei- und Vierkanalbetrieb
offen steht.
Zunächst wurde die Schaltung so aufgebaut,
dass der eingebaute D/A-Wandler genutzt und das Ausgangssignal
auf 5 V verstärkt wird.
Aber Pustekuchen!
Das STM32F103-Datenblatt ist dazu gemacht, zigtausendfache Umweltsünden
zu begehen!! Man muss es nämlich ausdrucken und alle nichtzutreffenden
Passagen durchstreichen! Das sind sehr, sehr viele.
Dann bleibt gar nicht mehr so viel übrig (und wichtige Seiten über den
Interruptcontroller fehlen noch), und das D/A-Wandlerkapitel
entfällt ganz! Ist also gar keiner drin. Also das übliche: Mit PWM.
(Ein echter D/A-Wandler stand schwachsinnigerweise im Pflichtenheft.)
Als AVR-Verwöhnter hat man es mit STM32F103 echt schwer.
Ein zutreffend gefiltertes Datenblatt ist man auch von 8-Bit-PICs
sowie EZUSB gewöhnt.
Hingegen kenne ich keinen 16- oder 32-Bit-Controller mit zutreffendem Datenblatt,
vom C167 vielleicht abgesehen.
Das Brems-Potenziometer braucht nur gelegentlich abgefragt zu werden.
Da das eine lückenlose Erfassung des Kraftsensors behindert,
wurde es trotzdem in das 200-kSa/s-Regime hineingepresst.
Mit dem zweiten A/D-Wandler sollte es möglich sein,
das Potenziometer und auch die Chiptemperatur nach dem
Telegramm vom Messschieber abzufragen; die Pause ist ziemlich lang.
Dazu muss der Kraftsensor vom ADC2 angefragt werden,
der dann durchlaufen muss.
Das Datenblatt schweigt sich IMHO aus, was passiert,
wenn ADC1 lange (17,1 µs vorgeschrieben für Temperatursensor) abtastet
und ADC2 währrenddessen laufend neue A/D-Werte produziert.
Und wie sich das Ganze resynchronisiert.
Günstig erscheint es für diesen Ansatz, die 3 langsamen Werte (Potenziometer,
Temperatur, Referenzspannung) per „eingespritzten“ (injected) Wandlungsprozess
in die laufende Erfassung der Takt- und Datenleitung vom Messschieber einzuschieben.
Die Verwendung von ADC2 für die Oszilloskopfunktion des Kraftsensors
ermöglicht es, den Analog-Watchdog des ADC1 für die Erkennung von
Taktimpulsen zu verwenden.
Damit kann man die Interruptlast für den Messschieber
dramatisch senken.
Der durchgestrichene Text ist hinfällig, weil der Messschieber
nicht mehr per A/D-Wandler sondern per Pegelwandler und SPI abgefragt wird.
Dadurch kann sich ADC1 um die Oszilloskopfunktion mit Trigger kümmern,
und ADC2 kümmert sich um alles andere.
Temperaturmessung fällt dadurch flach, weil diese nur an ADC1 möglich ist
und der Hardware-Trigger (notwendig für das Oszi) ebenfalls an ADC1 hängt.
Der wichtigste Teil der Servosteuerung ist der D/A-Wandler.
Alle anderen Parmeter des Servos werden über die serielle Schnittstelle
des STM32F103 vermittelt. Das erspart einen gesonderten USB-RS232-Umsetzer,
hält einen USB-Port frei und die Apparatur kompakt.
TODO: Noch zu implementieren
Das letztendliche Problem ist eine verbleibende Diskrepanz zur Praxis,
weil während des Einschlagimpulses der Widerstand nicht zunimmt
wie beim kegelförmigen Formstück (echtes Implantat)
sondern nach Überwindung der Haftreibung in etwa konstant bleibt.
Ein dem echten Einschlag entsprechenden Widerstand könnte man
durch kegelförmige Gleitflächen erreichen (dann fixer Zusammenhang
zwischen Weg und Kraftzunahme in Verbindung mit den Federkonstanten des Zustellsystems)
oder durch eine schnellwirkende Wegmessung und Bremskraftveränderung,
die dann in Mikrosekunden (!) reagieren müsste.
Was an Railguns erinnert:
Schneller als Körperschall zu sein.
Angemerkt , recht spät für so ein Projekt!
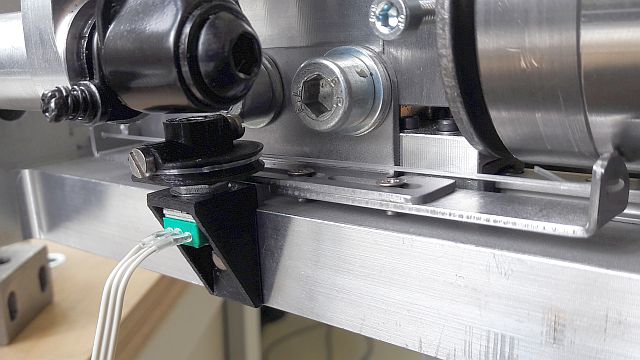
Das Ganze ist eine „Brettschaltung“, die schließlich auf einen
stabilen Tisch montiert wird.
In der Mitte befindet sich der Linearmotor, der über ein raumgreifendes
Hebelgestänge und einen
Bowdenzug eine
Fahrradbremse
betätigt, die den (zunehmenden) Widerstand beim Einschlagen simuliert.
Im linken Teil befinden sich Netzteil, Linak-Steuerung
sowie die via USB angeschlossene Gesamtsteuerung mit STM32F103-Mikrocontroller
und analoger Außenbeschaltung.
Auf der rechten Seite befindet sich der Hüftknochen-Simulator,
in den ein stangenförmiges Gebilde mit Schlagkopf eingeführt wird,
welches dem medizinischen Gerät einigermaßen nachgebildet sein soll.
Es besteht nicht aus teurem Medizin-Edelmetall.
Damit passt die Dimensionierung der Verstärkerschaltung
zum Problem. Der Jumper JP1 ist nicht gesteckt.
Die Linearität lässt zu wünschen übrig.
(Die Steilheit sollte gleich sein.)
Ob die Firmware oder die PC-Software die Linearisierung vornehmen soll
ist noch unklar.
„Freies“ Pin der Linearmotorsteuerung (MicroMaTch-6) ist nicht frei:
Keine Analogsteuerung möglich (mit der darüber geführten Ader)
Messschieber springt, Absolutwertgeber (Potenziometer) erforderlich,
Neukonstruktion von Hardware, Firmware und Software
Kraftmesser mit Adernabriss: Reparatur (erledigt) und Ersatzneubau (inspe)
Unklares Kalibrierungsergebnis mit Nichtlinearität,
aber 40 kN als Endwert erscheinen richtig.
Zu starkes Rauschen und Störspannungseinkopplung
bei externen Schalthandlungen und Motorbewegung (führt zu Triggerereignis)
Irrsinnige DLL-Konstruktion,
nicht nachmachen! HID nicht zielführend und WinUSB/WebUSB neuer Favorit,
dazu CDC für die Linak-Steuerung.
Falls es zu einer Überarbeitung kommt.
Kraftstoß = Impuls hat negative Anteile.
Kraftmaximum (zusätzlich) gewünscht.
2211xx: Das Wegmesspoti mit Seilzug wurde ergänzt.
Und funktioniert erstaunlich gut.
221207: Firmware-Umstrukturierungen fehlgeschlagen
nach 3 vollen Tagen Arbeit.
Zunächst ging es darum, die Report-Struktur auf float
statt int16_t umzustellen.
Wie sich schließlich herausstellte, ist das Quatsch
und verdammt viel unnütze Arbeit.
Weiterhin wurde das Handpotenziometer von ADC9 auf ADC4 umgeroutet.
Sowie der ADC1-Scanbetrieb auf 2 Kanäle erweitert.
Letztlich scheint es so zu sein, dass die DMA-ISR mit einer Aufruffrequenz
von 6 kHz keine zwei Statistikeinträge (je 2 Vergleiche und 1 Addition)
aktualisieren kann, dann blinkt die blaue LED nicht mehr,
und USB enumeriert nicht.
Bei 72 MHz CPU-Taktfrequenz.
Ohne zwei Statistiken kann das Wegpotenziometer nicht ausgewertet werden!
Ein zunächst vermuteter Überlauf von DMA-Puffern
scheint doch nicht in Betracht zu kommen.
Daher ein nahezu komplettes Rollback.
Geblieben ist:
Meldung des WebUSB-Gerätes: Umleitung auf app-hid.htm (statt app.htm)
(damit ist WebUSB „nur noch“ zur Ausgabe der Redirektion da)
Brems-Potenziometer an ADC4 (vormals ADC9)
Abtasten von ADC8 (Kraftmessdose) + ADC9 (Wegpotenziometer)
Der neue Zweikanalbetrieb erfordert das Ändern der DLL zur Impulsberechnung!
Nicht geschafft wurde:
Umstellung der Reportstrukturen: Statt min max sum
und einem globalen n
besser (und ausreichend) min max avg (Wurde implementiert aber durch Rollback vernichtet)
Statistikwert für Wegmesspoti (Wurde implementiert aber durch Rollback vernichtet)
Doppelpufferung der Statistikwerte und Swap über Zeiger
statt Interruptsperre (Wurde implementiert aber durch Rollback vernichtet)
Kraft-Nullwert ermitteln (Member repI.kraftnull)
Automatische Bremsenbetätigung bei Betätigung des Brems-Potenziometers
= Entreißen der Kontrolle über den Servo vom PC zum Potenziometer
Kraftintegration zur Impulsbestimmung
(erfordert Skalierung vor Summierung;
Nichtlinearität bereitet Kopfzerbrechen
Laden und Speichern von Kalibrierdaten
Trigger-Test mit dem Hammer
Nur noch WebUSB, kein WebHID, damit's auch am Smartphone geht,
dann auch DLL entsprechend umstellen.
Hauptvorteil: Dynamische Report-Länge für die Oszilloskopdaten
über Bulk-Endpoint.
Zur Untersuchung der Fehlerursache
wird wohl ein ausreichend großer Messplatz
(nicht der Mini-Wackeltisch)
mit Oszilloskop oder Logikanalysator benötigt,
um dem unerklärlichen Zeitverhalten
auf die Schliche zu kommen.
Denn der STM32F103 sollte schnell genug sein,
alle A/D-Werte in eine Statistikauswertung
einfließen zu lassen.
Er hat sonst nichts zu tun.
Das mit der „anscheinend knappen“ Rechenzeit in der DMA-ISR
ist mir bereits von Anfang an bekannt aber verdrängt.
Die Vergrößerung des DMA-Puffers von anfänglich 64 auf nunmehr
256 uint16_t schien nichts gebracht zu haben,
obwohl damit direkt die ISR-Auffrequenz sinken sollte.
Ursprünglich war sogar die Triggerung in Software implementiert,
ohne die umständliche Wurstelei mit dem Hardware-Trigger
und den umschaltenden ISRs.
Sogar mit parallel synchron laufenden ADCs, wobei ADC1 den Messschieber,
das Handpoti und die Temperatur abgefragt hat
und ADC2 (nur) den Kraftsensor.
Aber das klappte damals ebenfalls überhaupt nicht,
gleiches Problem: Zu wenig Rechenzeit.
Alles extrem fraglich.
220206: Erneut wurde nur Stückwerk programmiert,
diesmal mit 2 Debug-Ausgängen, die Rechenzeiten anzeigen,
und ein Digital-Oszi.
Seitdem ist es möglich, mit den DMA-Daten (> 800 kSa/s) sogar
Multiplikationen über alle Samples auszuführen
(für die Berechnung der Standardabweichung mittels
Verschiebungssatz).
Dabei geht 60% der Rechenleistung drauf, da ist also noch Luft für den Rest.
Ein Integer-Wurzelzieh-Algorithmus rundet das derzeitige Programm so ab,
dass alles hübsch ohne Gleitkomma auskommt.
Das Problem ist, dass kleinste Programm-Änderungen
mal zum Absturz führen und mal nicht.
Ein Trigger-Ereignis schickt den Mikrocontroller in die ewigen Jagdgründe.
220207: Der (selbst geschriebene) Urlader oder
das (selbst geschriebene) Flash-Programm hat ein Problem,
dass entweder das Flash-Schreiben (ohne Fehlermeldung) misslingt oder
der Sprung in das Anwendungsprogramm nicht klappt.
Lästig, weil das einem Firmware-Fehler ähnlich sieht:
So oft Reset drücken und flashen bis es geht.
Nachtrag 220316: Scheint eher ein Ansprung-Problem oder ein Windows-Problem zu sein.
Ab- und Anstecken ist daher die bessere Lösungsfindung.
220313: Das Trigger-Ereignis führt jetzt nicht mehr zum Absturz, aber es passiert nichts.
Mit den gemachten Änderungen hat das wenig zu tun: die Absturzursache ist unbekannt.
220314: Es triggert endlich: wValue hat zwischen JavaScript und Mikrocontroller nicht gepasst.
Aber ohne Antwort. Hier und da herumgefummelt (u.a. in der USB-Senderoutine) und es kommt
endlich die Antwort.
Der Feature-Deskriptor ist jedoch total falsch.
Schier endloses Wühlen brauchte einen Linkerfehler oder
objcopy-Fehler zum Vorschein:
Die Initialisierungsdaten liegen in der HEX- oder BIN-Datei
8 Bytes hinter__etext. 💩 Toll!
220315: Das (synchrone) Senden von USB-In-Datenblöcken musste nochmal überdacht
und mit Timeouts versehen werden.
Die Fälle, wenn ein herumgammelndes altes (nicht zum Host gesendetes) Paket vorgefunden wird,
welches nicht nach 1..2 ms verschwindet:
Belassen um Reihenfolge zu behalten, usb::send() liefert false.
Erforderliches Verhalten für Folge-Transfers (> 63 Byte) aus mehreren Paketen.
Löschen und neu beschreiben, usb::send() liefert true:
Bulk-Paket wurde von (nicht laufender) WebUSB-Äpp nicht abgeholt,
der frisch gestarteten WebUSB-Äpp keine alten Daten präsentieren.
Länger warten, weiter beim ersten Punkt. (Hier allenfalls beim Interrupt-Endpoint)
Löschen und STALL setzen. (Hier nicht)
220316: Verflixt, bei HID kommt weder das Oszillogramm noch das entsprechende Flagbit
in RepI an, wobei bei WebUSB alles ganz sauber funktioniert.
Während letzteres Problem sich schließlich von selbst löste, war das mit dem Oszillogramm wie verhext:
Ursache war ein großzügig angesetztes bInterval im Endpoint-Deskriptor:
bInterval ist auch für das Inter-Paket-Intervall (eines längeren Transfers) zuständig!!
Dadurch brach usb::send() mit dem 2-ms-Timeout ab, und usbhid.sys
ignoriert schweigsam dieses Problem.
Ein aggresives bInterval = 1erschlägt das Problem, aber die Moral von der Geschicht':
Über den HID-Interrupt-Endpoint übertrage man gefälligst keine Oszilloskop-Tracedaten!
Wenn schon HID dann sollte das via getFeature() erfolgen.
Oszillogramm der Tracedatenübertragung:
Zunächst 19 Pakete via Interrupt-In an HID, danach 19 Pakete via Bulk-In an WebUSB
230322: Die Firmware-Umstellung auf variable Kanalzahl des Oszilloskops hat versagt:
Vollabsturz.
AC-Kopplung funktioniert. Triggerquellen-Umschaltung funktioniert nicht bei laufendem Betrieb,
nur zur Voreinstellung.
Das Wegmess-Poti rutscht bei Schlägen durch: Neukonstruktion mit Formschluss erforderlich!
Keine Zeit dafür bis zum Vorführtermin morgen.
230323: Die Triggerkopplung wurde auf AC voreingestellt.
Das Triggersystem arbeitet nunmehr mit „Triggervorbereitung“ (wie bisher) und „Triggerhysterese“ (neu).
Diese ist positiv für steigende Flanke und negativ für fallende Flanke.
Während die „Triggervorbereitung“ bei AC-Triggerkopplung alle 100 ms vom Mittelwert nachgeführt wird,
bleibt die „Triggerhysterese“ konstant.
Die beiden Schwellen des A/D-Watchdogs werden entsprechend nachgeführt.
Die Umschaltung der Triggerquelle funktioniert endlich,
wird aber (mit dem kaputten Wegmesspoti) nicht benötigt.
Irgendwie wird der Kraftsensor überhaupt nicht mehr ausgereizt, die maximal erreichbaren Kraftwerte
liegen bei 4 kN (400 kp).
Also nur bei 10 % vom Endwert.
Dabei ist der gesamte Kraftstoß etwa 1 ms breit, während sich die Potimechanik rund um das Wegmesssystem
eher 4 ms Zeit lässt, bei straffer Bremse.
Ob das jetzt die gebremste Masse oder aber die Seilkonstruktion um die Potiachse ist
lässt sich nicht ohne weiteres feststellen.
Mit einer High-Speed-Kamera vielleicht.
Der ermittelte Kraftstoß liegt so bei Werten um 20 (nach der Division mit dem 1-ms-Integrationsintervall).
Und die Maximalkraft bei reichlich 100.
Wohlgemerkt, bei einem 12-Bit-A/D-Wandler.
Alles in allem eine schlechte Dimensionierung.
Aber für's Prinzip reicht es jetzt:
Es kommen für unterschiedlich starke Schläge unterschiedlich starke Impulse, Kraft-Maxima und Verschiebewege.
Die AC-Triggerung ist hinreichend empfindlich.
Das Ergebnis bei poll() kommt sehr schnell, innerhalb von 30 ms.
Das ist IMHO der größte Vorteil der Umgestaltung.
Weiterhin stimmt der Weg-Wert immer (weil Absolutwertgeber), der Messschieber springt gelegentlich.
Werte vom Messschieber werden von der DLL nicht mehr geliefert.
Die DLL braucht das Oszillogramm nicht (wie bisher) auszuwerten, das macht jetzt die Firmware.
Die Firmware ist nunmehr als ein bis-zu-4-Kanal-Oszilloskop ausgelegt.
Die Triggerquellenumschaltung funktioniert jedoch nicht so recht.
Die Voreinstellung in der Firmware ist 2 Kanäle (ADC8+ADC9), 4 ms Samplezeit, Triggerhysterese +50,
Triggerquelle ADC8, AC-Kopplung, kurzer Prätrigger.
Die Voreinstellung wird nach Reset wirksam, daher hilft beim irrtümlichen Verstellen das Ab- und Anstecken.
Allerdings kann man nicht ohne Neuübersetzung andere Voreinstellungen
(bei geänderten Aufbauparametern, bspw. mehr Rauschen, was mehr Hysterese erfordert) festlegen.
Mit den 4 ms ist der RAM des STM32F103 nahezu erschöpft, das sind knapp 2 K Samples pro Kanal.
Für mehr Zeit müsste man die Summenabtastrate heruntersetzen.
Strukturell steht eine DMA-Pufferumschaltung bei Triggerereignis an.
Das erspart die murksig erscheinenden memcpy()-Aufrufe.
Für die nächste Firmware-Überarbeitung …






{kind=link}