- Beim Aufwecken aus dem Ruhezustand, mit angestecktem USB2LPT, erscheint Bluescreen mit DRIVER_IRQL_NOT_LESS_OR_EQUAL (IRQL==2). Betrifft alle WindowsNT 32 bit.
- Applikation schläft ein (betrifft GhaiRacer unter Windows 98/Me, nicht WindowsNT)
- Eine Applikation, welche USB2LPT benutzt, kann einschlafen, wenn man USB2LPT abzieht
- Treiber für 64-bit-Windows zertifiziert aber produziert Bluescreens.
- Will man den Debugregister-Trap aktivieren, kommt es Minuten später zum Fehler 0x109. Es gibt Lösungen dagegen, aber nicht von mir. Das Programm warnt entsprechend.
- USB2LPT Low-Speed funktioniert nicht am PC/Notebook sondern nur an einem USB-Hub
- Speisespannung des ATmega8 / ATmega48 mit D2 BAV199 reduzieren und Brücke SJ3 durchkratzen, R1 durch 1,5 kΩ ersetzen (Nachteil: Peripherie wird mit 3,3 V statt 5 V betrieben), oder
- Zener-Dioden 3,9 V nachbestücken (Nachteil: Nicht vorgesehen, weniger sicher), oder
- zurückschicken und ggf. umbauen lassen (bitte den PC/Notebook-Typ sowie die anzuschließende Hardware mitteilen!)
{kind=link}
- Ja, mit den gleichen Einschränkungen wie unter Windows XP, siehe nächste Frage.
- Unter x64 (genauer: AMD64) läuft USB2LPT mit
Debugregister-Trap nur dann erfolgreich,
wenn der PatchGuard deaktiviert wurde.
- Davon unabhängig ist das Problem der Treiberzertifizierung.
Seit 2015 ist der Treiber zertifiziert.
Wenn Sie im Gerätemanager den Fehlerkode 52 sehen,
dann gibt es damit ein Problem.
Dann gibt es folgende Möglichkeiten, mit abnehmender Empfehlung:
- Den Computer für automatische Updates konfigurieren und mindestens 48 Stunden am Internet laufen lassen: Das installiert das notwendige Wurzelzertifikat.
- Das Problem ignorieren und das alternative HID-Interface benutzen – die Firmware muss dazu mindestens vom März 2012 sein!
- Beim nächsten (und jedem weiteren!) Booten Taste F8 drücken und „Treiberzertifizierungszwang deaktivieren“ auswählen
- Irgendein Treiberzertifizierungszwang-Deaktivierungsprogramm installieren
- Entschärfend ist der Umstand, dass es nur eine Handvoll DLLs gibt, die unter Win64 direkt auf Ports zugreifen können. Diese kann man USB2LPT-spezifisch (native API oder HID-API) umschreiben
- Zur gänzlichen Vermeidung von selbst geschriebenen (unsicheren) Kernel-Mode-Treibern ist die Firmware-Erweiterung im Test, die den Zugriff allein via HID ermöglicht.
- Davon unabhängig ist das Problem der Treiberzertifizierung.
Seit 2015 ist der Treiber zertifiziert.
Wenn Sie im Gerätemanager den Fehlerkode 52 sehen,
dann gibt es damit ein Problem.
Dann gibt es folgende Möglichkeiten, mit abnehmender Empfehlung:
Es besteht eine gewisse Chance für ältere Programme (etwa vor 1995; das bezieht sich auf das letzte Update!).
Im Vorfeld kann unter Windows 3.1, 3.11, 95, 98, Me und 2000 mit dem Dongle-Emulator geprüft werden, ob Zugriffe mitgeschnitten werden können. Jenes Programm läuft nicht unter XP und neuer. (Es funktioniert anscheinend, aber es wird nichts mitgeschnitten: Debugregister-Klau.)
Unabhängig vom Alter der Software besteht eine gewisse Chance, wenn man das Dongle erwartende Programm in einer Virtuellen Maschine (also im Gastsystem) startet. Wo USB2LPT laufen muss (im Host- oder im Gastsystem) muss man ausprobieren.
inpout32.dll
oder porttalk.dll.
Serielle Schnittstellen sind in ihrer Funktionalität durch die Win32-API so gut abgedeckt,
dass ein Direktzugriff so gut wie nie erforderlich ist
(und auch recht viel Arbeit macht).
Die Steuerleitungen RTS und DTR sind neben TxD mittels
EscapeCommFunction() digital steuerbar.
Die Statusleitungen CTS, DSR, DCD, RI und RxD können mittels
GetCommModemStatus() abgefragt werden.
Dies gilt übrigens auch für 16-bit-Windows-Programme.
Manche Programme sind mit Umsetzern auf Seriell extrem langsam.
Solche Programme benutzen die beiden Steuerleitungen RTS und DTR;
die Umsetzung von EscapeCommFunction() auf USB ist bisweilen schlecht gelungen.
In diese Kategorie fallen
einfache Programmiergeräte für PICs.
 Nein, USB2LPT ist hierfür nicht perfekt, wenngleich geeignet. Die Nachteile sind:
Nein, USB2LPT ist hierfür nicht perfekt, wenngleich geeignet. Die Nachteile sind:- Nicht ganz stabiler Betrieb des Treibers wegen der Hardcore-Programmiertricks darin
- Zurzeit nicht verfügbar auf Nicht-Windows-Systemen
- Treiberinstallation auf Zielsystem erforderlich (nervt den Anwender zusätzlich)
- Kein Massenartikel
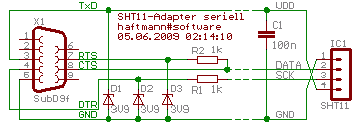
Für bis zu 3 Ausgabeleitungen (und bis zu 5 Eingabeleitungen) nimmt man besser
das serielle Port (siehe oben).
Dann funktionieren USB→Seriell-Umsetzer wie dieser problemlos.
Nur um die Pegelumsetzung nach TTL muss man sich kümmern, wenn erforderlich;
am einfachsten mit Zener-Dioden 3,9 V.
Die maximale Datenübertragungsrate über USB liegt bei 1000 Pegelwechseln pro Sekunde.
Bei echten seriellen Schnittstellen bei 10000 Pegelwechseln pro Sekunde.
Die Steuerung der Ausgabeleitungen erfolgt mittels (Win32:) EscapeCommFunction(),
das Abfragen von 4 Eingabeleitungen mittels GetCommModemStatus(),
RxD mittels WaitCommEvent() (man muss auf EV_BREAK warten).
Obendrein kann man via TxD Einzelpulse definierter Länge im µs-Bereich ausgeben,
indem man bei gewählter Baudrate ein geschicktes Byte aussendet.
Und mittels RxD kann man die Pulslänge von eingehenden Einzelimpulsen in 8 Stufen „messen“,
indem man das Empfangsbyte entsprechend auswertet.
Vorteil: Funktioniert gleichermaßen mit eingebauten sowie USB-seriellen Schnittstellen. Einfache Zeitsteuerung möglich
Nachteil: Bei USB-Seriell-Konvertern ist eine herstellerspezifische Treiberinstallation erforderlich. Pegelkonvertierung
Für bis zu 8 Ausgabeleitungen und 3 Eingabeleitungen ist die Verwendung von
handelsüblichen USB→Drucker-Adaptern
(oder dieser)
eine günstige Lösung, sofern man auf die „harte“ 5-V-USB-Speisespannung verzichten kann.
Die Ankopplung erfolgt mit
dieser oder
jener Hilfsschaltung —
oder komfortabel und universell mit Eingangsbitparallelisierung.
Die maximale Ausgabe-Datenübertragungsrate liegt bei 100000 Pegelwechseln pro Sekunde
(auch mehrere Leitungen gleichzeitig, das ist schon recht schnell).
Günstig für LEDs und Flüssigkristall-Anzeigen mit Controller
(Text oder vollgrafisch), Hauptsache, man kommt mit 8 Ausgabeleitungen hin.
Auch typisch serielle Gerätschaften wie Schrittmotoren, serielle D/A-Wandler
sowie im Amateurfunkbereich gern verwendete
DDS-Generatoren
lassen sich damit gut ansteuern.
Die Statusleitungen ERR ⑮, ONL ⑬ und PE ⑫ können mittels
DeviceIoControl(…,IOCTL_USBPRINT_GET_LPT_STATUS,…)
mit maximal 1 kByte/s gelesen werden.
Zur Not lässt sich INIT (16) als Reset-Ausgabeleitung benutzen, mittels
DeviceIoControl(…,IOCTL_USBPRINT_SOFT_RESET,…)
kann man einen LOW-Impuls von einigen µs Dauer ausgeben.
Die übrigen Steuer- und Statusleitungen STB ①,
AF ⑭, SEL (17), ACK ⑩ und BUSY ⑪
können definitiv nicht verwendet werden!
Für den Einsatz solcher Konverter spricht, dass diese oftmals als
Fehlinvestitionen in Schubläden des Bastlers herumgammeln und
auf ihren Sankt Nimmerleinstag warten
(denn Drucker mit Parallelport verschwinden ebenfalls).
Die Nachbausicherheit ist durch den massenhaften Import aus China gegeben.
Vorteil: Viele Ausgabeleitungen, hohe Geschwindigkeit, keine sichtbare Treiberinstallation (außer Win98), TTL-Pegel
Nachteil: Alternative echte Parallelports erfordern Verzweigung in Software mit dem Problem des Direkt-Portzugriffs,
AUSSER bei Verwendung meiner InpOut32.dll (enthält automatischen Redirektor).
Geringere Verbreitung
Ein Handle zum USB→Drucker-Adapter bekommt man unter Windows mit
diesem unübersichtlichen SetupAPI-Kode.
Bei Linux ist es hingegen so einfach: Bloß /dev/usb/lpn öffnen …
{kind=link}
{kind=link}
Beliebig viele Ausgabeleitungen kann man mittels Portexpandern (74HCT595) aus jeder der vorhergehenden Lösungen erreichen.
Für Aus- und Eingabeleitungen und USB-Strom
(und eingebaute Intelligenz) nehme man (am besten HID-basierte) Lösungen, etwa
diese
oder jene
oder — noch besser —
dieses Universalkonzept
(wollte ich eigentlich erfinden).
Damit hat man keinerlei Sorgen mit Kernel-Mode-Treiber, Debugregister-Klau oder x64.
USB2LPT bietet zusätzlich ein HID-kompatibles Interface.
Wer 8..16 Ports via serielle Schnittstelle (COM-Port) steuern will, kommt am preiswertesten und bastelfreundlichsten mit einem PIC16F145x weg. Einen Urlader mit zusätzlicher Ein-/Ausgabe-Funktion habe ich mit Assembler in 512 14-Bit-Worte gequetscht. Und hier ist die Firmware. Damit kann man sogar Analogwerte einlesen und PWM generieren. Mit dem Datenblatt in der Hand muss man sich da Portadresse für Portadresse durcharbeiten.
Für bis zu 2 (manchmal auch 6) Ausgabeleitungen mit exakter Zeitsteuerung im µs-Bereich
nimmt man die … Soundkarte!!
Um das Problem der fehlenden Gleichspannungskopplung und der unbekannten (kleinen) Spannungspegel
muss man sich selber kümmern (OPV,
Komparator);
der Ausgang ist ohnehin nur für kurze Impulse geeignet.
Statt analoger Werte gibt man nun eben digitale Werte mittels (Win32:)
waveOutWrite() aus.
- Schrittfrequenzen von mehr als 10 kHz sind konzeptioneller Käse und zeugen vom fehlenden Verständnis moderner Motorsteuerungen! (Ich rede hier vom Stand von 1990.)
- Mikroschrittbetrieb (um den es bei solchen Frequenzen geht) lässt sich viel einfacher und ressourcenschonender durch Stromsteuerung mit konstanter Abtastrate (bspw. 8 kSa/s) erreichen. Siehe hierzu die moderne Trinamic-Motorsteuerung TMC249
- Via USB gesteuert drängt sich die
Audio-Geräteklasse zur Steuerung auf, siehe auch NC-Gedanken:
- Pro Motor 1 8-bit-Kanal mit Beschleunigungswerten, sehr übersichtliche, kompakte und einfach dokumentierbare Funktionsweise
Im Gegensatz zu Audio-PCM, bei der Lageinformation (der Lautsprechermembran) übertragen werden, wird hier Beschleunigungsinformation (also ein doppelt differenziertes Signal) übertragen.
Ein zusätzlicher USB-Deskriptor gibt an:Wertebereich Bedeutung –128 … –65 Stopp; typisch für 80h-zentrierte Audio-Daten –64 … –1 Beschleunigung zurück 0 Gleichförmige Geschwindigkeit +1 … +64 Beschleunigung vorwärts +65 … +127 Stopp; typisch für 80h-zentrierte Audio-Daten - die gewünschte Betriebsfrequenz (Abtastrate) oder Bereich; 1 kSa/s reicht in der Praxis völlig aus
- die Weglänge und -einheit pro Mikroschritt und Achse
- die Lage der Achse im Raum (als Visualisierungshilfe für das PC-Programm)
- die maximal erlaubte Geschwindigkeit und Beschleunigung
- die Anzahl der irrelevanten Bits pro Achse (bspw. Halbschrittsteuerung = 5 irrelevante Bits)
- die Lage von Anfangs- und Endschaltern (Software-Grenzen) sowie das Vorhandensein von echten Referenz- und Endschaltern
- eine Rotationskennung für umlaufende (endlose) Antriebe (Werkzeugspindel, Kettenförderer)
- wenn Platz vorhanden, eine VR-Beschreibung der Werkzeugmaschine
- die aktuelle Position, Geschwindigkeit und Beschleunigung
- den Referenzierungs-Zustand
- den State-Machine-Zustand während der Refenzschalter-Suche
- den Zustand der Bremse, der Motor-Bestromung, Temperaturen, Türkontakt u.ä.
- die Ereignisse von der Lokalbedienung (ggf. via USB-HID)
- Referenzfahrt (Achse/alle, Richtung, MaxSpeed, MaxAccel) [MaxSpeed, MaxAccel = 0 → nimm Maximalwerte]
- Referenzierung aufheben / annehmen (Achse)
- Zielfahrt (Achse, Position, MaxSpeed, MaxAccel) [MaxSpeed, MaxAccel = 0 → nimm Maximalwerte]
- Soforthalt (Achse/alle, mit/ohne Bremsrampe = ohne/mit Verlust der Referenzierung)
- Anzeigen-Steuerung (ggf. via USB-HID)
- Inzwischen billige und sehr gut verfügbare Mikrocontroller mit (nur) USB Full-Speed reichen völlig aus
Notfalls tut's sogar die serielle Schnittstelle, wie hier bewiesen. - Kein Kernel-Treiber erforderlich, liefe prompt mit 32- und 64-bit-Windows und -Linux sowie mit MacOS
- Sehr guter Rechenlastausgleich zwischen PC (dieser muss nur noch Positionsdifferenzen ausgeben) und USB-Mikrocontroller
- Pufferung wird vom Audio-System übernommen, keine „Interruptfrequenz“ auf PC-Seite erforderlich
- Geringe Latenz dank DirectSound, geringer Overhead dank isochroner USB-Pipes
- Keine (schleppende) Phasendifferenz zwischen den Achsen der NC-Maschine
- „Rückkanal“ (also Audio-Eingabe) für den Transfer von Motor- und Endschalter-Informationen quasi nebenbei verfügbar
- Freiform-Bahngenerierung problemlos, speicherbar in bereits standardisierten .WAV-Dateien
- CNC-Maschine ist mit derartigen .WAV-Dateien mit beliebigem .WAV-Player testbar (sofern der Player die erforderliche Kanalzahl unterstützt).
- Hervorragende Eignung für Parallelkinematiken (bspw. Hexapod), ggf. kann der Mikrocontroller lineare in Motorachsen umrechnen
- Automatischer Schlafmodus der NC-Maschine mit reduzierter Stromaufnahme, solange keine „Audio“-Daten fließen
- Pro Motor 1 8-bit-Kanal mit Beschleunigungswerten, sehr übersichtliche, kompakte und einfach dokumentierbare Funktionsweise
Als Mikrocontroller zur Stromsteuerung kommen am ehesten ARM7-basierte Controller
wie NXP (ehem. Philips)
LPC214x
oder Atmel
AT91SAM7S
oder etwa
AT32UC3B64 zum Einsatz.
Die modernen MSP430F55xx
von Texas Instruments
sind wegen fehlender isochroner USB-Pipes leider nicht geeignet.
Ich werde mich umgehend diesem Problem annehmen da mir eine NC-Maschine vor die Füße gefallen ist; hat aber nichts mehr mit USB2LPT zu tun. (110401)
Übrigens: Warum Schrittmotor-Endstufen mit dem bipolaren Heizstein L298 immer noch zu astronomischen Summen verkauft werden, ist mir ein Rätsel. Schon längst gibt es ausgereifte Lösungen in MOSFET-Technologie, entweder mit externen Transistoren (für große Leistungen) oder vollintegriert wie beim A4983 (immerhin 2 A). Da wird's bestenfalls handwarm.
 Für die Steuerung von
LCD
wurde mir USB2LPT empfohlen. Ist das korrekt?
Für die Steuerung von
LCD
wurde mir USB2LPT empfohlen. Ist das korrekt?
- Low-Speed (Version 1.6) reicht für Text-LCD (siehe Foto rechts, zu Kontrollzwecken ist der Lpt-Tester im Einsatz)
- Für vollgrafische LCD macht sich der Geschwindigkeitsvorteil von High-Speed (bspw. 1.7) bemerkbar
- Von Vorteil ist, dass man sich auf Pin 25 der SubD-Buchse 5 V zur Speisung herausführen kann
Aber genau genommen muss ich auch hier ausholen:
- Für LED und LCD (Siebensegment, Sechzehnsegment, Punktmatrix und Vollgrafik) existiert eine Usage Page der HID-USB-Geräteklasse! Siehe HID Usage Tables 1.12, ab Seite 109 „18 Alphanumeric Display Page (0x14)“. Sie existiert, um verwendet zu werden. Nicht, um das Rad nochmal zu erfinden.
- Steuersoftware kann automatisch die Anzahl, Abmessungen und Fähigkeiten des Displays in Erfahrung bringen. Richtiges PnP eben.
- Eine Referenzimplementierung ist in Arbeit. Zum einen, um USB2LPT unnötig zu machen. Zum anderen, um die Kommunikation mit vollgrafischen Display auf Trab zu bringen, trotz USB Low-Speed mittels V-USB.
- Aber mir ist keine sinnvolle Steuersoftware bekannt, die auf PC-Seite läuft. Eventuell ist da wieder eine Referenzimplementierung erforderlich, kann das mal bitte jemand anders machen?
Ernsthafte Bastler, die das Programmieren von Mikrocontrollern scheuen, sollten es mit USB→Drucker-Adaptern (siehe oben) versuchen. Vorteile:
- Kein Geschwindigkeitsproblem
- Kein Beschaffungsproblem
- Übersichtliche Bastelschaltung mit Grundgattern
Um die Auffang-Flip-Flops (74HCT574) zu vermeiden, sollte E mittels Inverter von STB gespeist werden. Möglicherweise kann man sogar auf den Inverter verzichten.

- STB (1) und ACK (10)
- BSY (11) und GND (22)
Vielleicht hat er ja eine Hintertür (zusätzliche Control-Transfers zum direkten Zugriff auf Portpins), aber das ist erstens unwahrscheinlich und zweitens unheimlich schwer herauszufinden.
Der PL-2305 hat eine Hintertür.
Sein Beschreiber-Aufbau ist nämlich folgender:
|
Lohnenswerter erscheint die Emulation von REP INS-Befehlen. Diese kommen aber beim Druckerport so gut wie nie vor, höchstens bei ECP/EPP.
Der Mikrocontroller führt die IN- und OUT-Befehle etwa in 1 µs aus. Eine langsamere zeitliche Abfolge lässt sich per se nur in 1-ms-Stückelung erreichen. Für Wartezeiten im µs-Bereich ist ein Warte-Befehl im zu sendenden Datenblock vorgesehen.
Der High-Speed-Konverter hat folgenden Beschreiber-Aufbau:
|
Für genauere Zeitsteuerung empfiehlt es sich, eine selbstgeschriebene 8051-Firmware in den Mikrocontroller zu laden und ausführen zu lassen. Dann »verkommt« dieser Konverter zum gut verpackten Demo-Board für den EZUSB.
Eine neue Leiterplatte wäre erforderlich: Lohnt nicht; dafür gibt es preiswerte „Mini Gender Changer“ zu kaufen.
USB2LPT.SYS enumeriert sich auf das nächstfreie LPT-Port bis zu LPT9999.
Damit ist USB2LPT als viertes Parallelport automatisch bspw. mittels
CreateFile("\\\\.\\LPT4", …)
ansprechbar.
USB2LPT.SYS hingegen enumeriert sich nicht mit Funktionen wie
SetupDiEnumDeviceInterfaces(),
im Gegensatz zu echten Parallelports.
Ich weiß nämlich nicht, wie man das programmiert.
Auch kann man das USB2LPT-Parallelport nicht über die Registrierung erfassen – hier gab und gibt es unterschiedliche Wege.
Die meisten Anwendungsprogramme interessieren sich überhaupt nicht für
die „Nummer“ des Parallelports (daher spielt deren Anzahl überhaupt
keine Rolle), sondern nur für seine Basisadresse.
Diese müssen Sie im Geräte-Manager unter USB2LPT→Eigenschaften
wahlfrei einstellen, und dabei eine
freie, noch nicht anderweitig verwendete Adresse angeben.
Ohne nachzusehen ist man ziemlich sicher mit Adressen von 100h bis 1D8h.
Nicht „austricksen“ lassen sich DOS-Programme, die die Basisadresse
von den Adressen
[40h:08h], [40h:0Ah] oder
[40h:0Ch] lesen, es sei denn, Sie
schreiben ein kleines DOS-Hilfsprogramm, welches die o.g. Speicherzelle
modifiziert und anschließend das gewünschte DOS-Programm
(Int21/AH=4Bh)
startet.
Bevor ein Linux-Treiber geschrieben wird, sollte erkundet werden, auf welches device die in Frage kommenden Programme zugreifen, und welche Steuerkodes benutzt werden. Oder greifen die Programme per modifizierter IOPM-Tabelle aus dem User-Mode direkt auf Portadressen zu? Dann wären ebenfalls Klimmzüge wie Debugregister-Trap notwendig...
Aber ich verwende kein Linux und habe keine Ahnung von Linux-Kernel-Programmierung, noch dazu die fällige PnP-Unterstützung für die verschiedenen Distributionen.
Anmerkung von JGrosJean at ieee.org: “My low speed USB2LPT works in WinXP running on a virtual machine using Oracle VirtualBox in Linux.”
Um den gleichen Treiber verwenden zu können, muss man nur das Interface 1:1 nachbilden. In diesem Fall ist auch die Wiederverwendung „meiner“ VID und PID zulässig und vernünftig.
Das Interface ist offen gelegt und durch zwei verschiedene Quelltexte (einer in 8051-Assembler und einer in avrgcc-C) nachvollziehbar. Siehe API.
Tipp gefunden bei Dokumentation von u-eye, Danke! Application Note AN_AB.1.0019